PhotoRobot Cube V5 / V6 / Manual d'usuari compacte
Aquest manual d'usuari proporciona instruccions tècniques sobre la instal·lació, connexió i ús del PhotoRobot Cube V5 / V6 / Compact. Inclou instruccions sobre com instal·lar el robot Cube com a suport de tors de maniquí giratori. El manual té com a objectiu donar suport als clients de PhotoRobot durant el muntatge del seu dispositiu, el seu primer ús i en la incorporació d'operadors de línies de producció.

Nota: La primera instal·lació d'un dispositiu PhotoRobot sempre ha de ser realitzada per una autoritat autoritzada de PhotoRobot. Les autoritats amb autorització per instal·lar PhotoRobot són un distribuïdor homologat o un representant del propi fabricant.
Important: Consulteu sempre primer la informació i les instruccions de seguretat de PhotoRobot, a més del manual proporcionat específicament amb el vostre dispositiu abans de qualsevol autoinstal·lació o primer ús.
Cube V5 / V6 / Primer ús i instal·lació compactes
Gràcies i enhorabona per la teva compra de PhotoRobot Cube! El vostre dispositiu representa dècades d'experiència professional, coneixements i innovació en fotografia automatitzada. El disseny de cada robot està pensant en tu. Mentrestant, el programari està en constant desenvolupament, adaptant-se a les necessitats úniques alhora que beneficia tot l'ecosistema PhotoRobot amb cada actualització.
Benvinguts a PhotoRobot. Utilitzeu aquesta documentació tècnica sobre el Cube V5 / V6 / Compact PhotoRobots per familiaritzar-vos amb la tecnologia i obtenir instruccions que detallen el muntatge i el primer ús de la solució.
1. Descripció del producte: cub V5 / V6 / Compact
Els dispositius PhotoRobot Cube V5 / V6 / Compact són un dels robots d'estudi fotogràfic més versàtils. Cada cub és capaç de funcionar de manera autònoma o en combinació amb altres PhotoRobot i compta amb configuracions per a 3 modes diferents de funcionament. El cub funciona com una plataforma fotogràfica giratòria, en mode de suspensió d'objectes, i com a suport de tors de maniquí giratori.

Les característiques clau del PhotoRobot Cube inclouen:
- Ús autònom o en combinació amb PhotoRobot compatibles
- Configuració ràpida com a plataforma giratòria 360 o en mode de suspensió d'objectes
- Suport per a un portators de maniquí o plataforma giratòria
- Compatible amb maniquins de fotografia de diferents tipus i mides
- Disponible en versions Cube V5, V6 i Compact per a una major versatilitat
1.1. Visió general del dispositiu: cub V5 / V6 / Compact
El Cube V5, el Cube V6 i el Cube Compact de PhotoRobot estan operatius en tres configuracions diferents. Les configuracions estàndard impliquen utilitzar el dispositiu com a plataforma fotogràfica giratòria o per suspendre objectes a l'aire per fer fotos. Com a alternativa, és possible configurar el dispositiu com a suport giratori per muntar un tors de maniquí.
a) Configuració de la plataforma fotogràfica / rotativa de 360°:

b) 360 / Mode de suspensió rotativa:

c) Suport de tors de maniquí giratori:

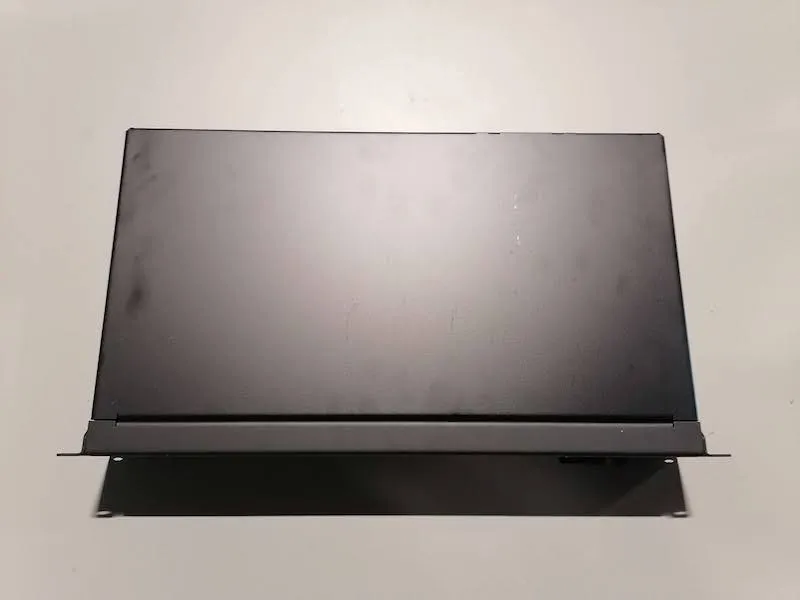
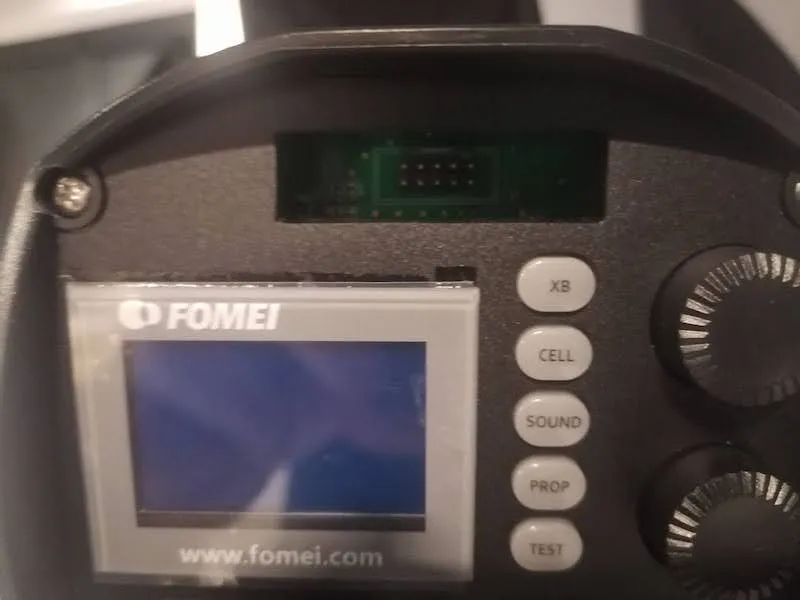
Nota: La unitat de control del Cube V5 i el Cube V6 són un component separat però integral dels dispositius. El Cube Compact té una unitat de control integrada dins de la màquina.
- La imatge de dalt mostra la unitat de control per al Cube V5 / Cube V6.
1.2. Paràmetres tècnics de Cube Compact
Hi ha els següents paràmetres tècnics per al Cube Compact.
- Pes: 26,21 kg
- Dimensions: 337,5 x 373,5 x 209,5 mm
- Font d'alimentació: 100 - 230 V, 50 HZ, fusible T1.6 A (230 V), T3.15 A (115 V)
- Capacitat de càrrega: 130 kg tant per al muntatge inferior com superior
- Parell de l'eix de sortida: 143,5 Nm
- Velocitat: 0 -17 1.min-1
1.3. Accessoris Cube Compact
El Cube Compact té les següents peces i accessoris.
a) Penjador:

b) Base inferior:

c) Base superior:
d) Peus de màquina:

e) Placa:

f) Portal:

1.4. Visió general de la instal·lació i l'ús de Cube Compact
A més dels accessoris Cube Compact, hi ha múltiples configuracions per a la instal·lació i ús del Cube Compact. Aquests inclouen les següents parts de configuració i configuracions.
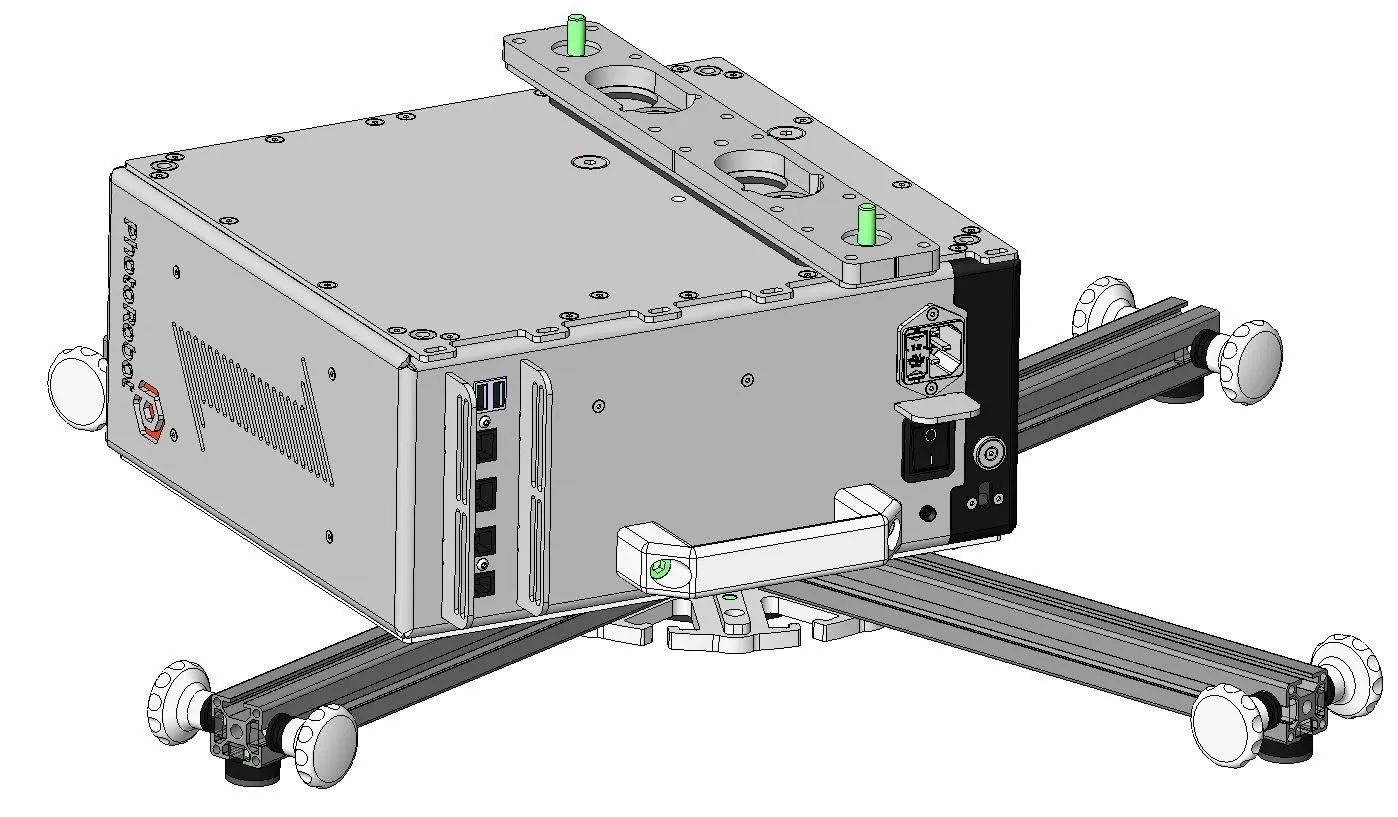
a) Placa de subjecció inferior (per fixar el tocadiscs del dispositiu o el sistema de muntatge):
b) Plataforma giratòria autònoma fixada (fixada al terra per a una major estabilitat):


Nota: En aquesta configuració, hi ha una placa de 95 cm amb una base de muntatge a una superfície estable del terra. Això estabilitza la màquina quan s'utilitza, funcionant per evitar bolques. Els seus casos d'ús inclouen la presentació d'objectes de mida petita i mitjana, de fins a una mida màxima de 60 - 65 cm.
c) Plataforma giratòria independent (amb peus de dispositiu en ús):
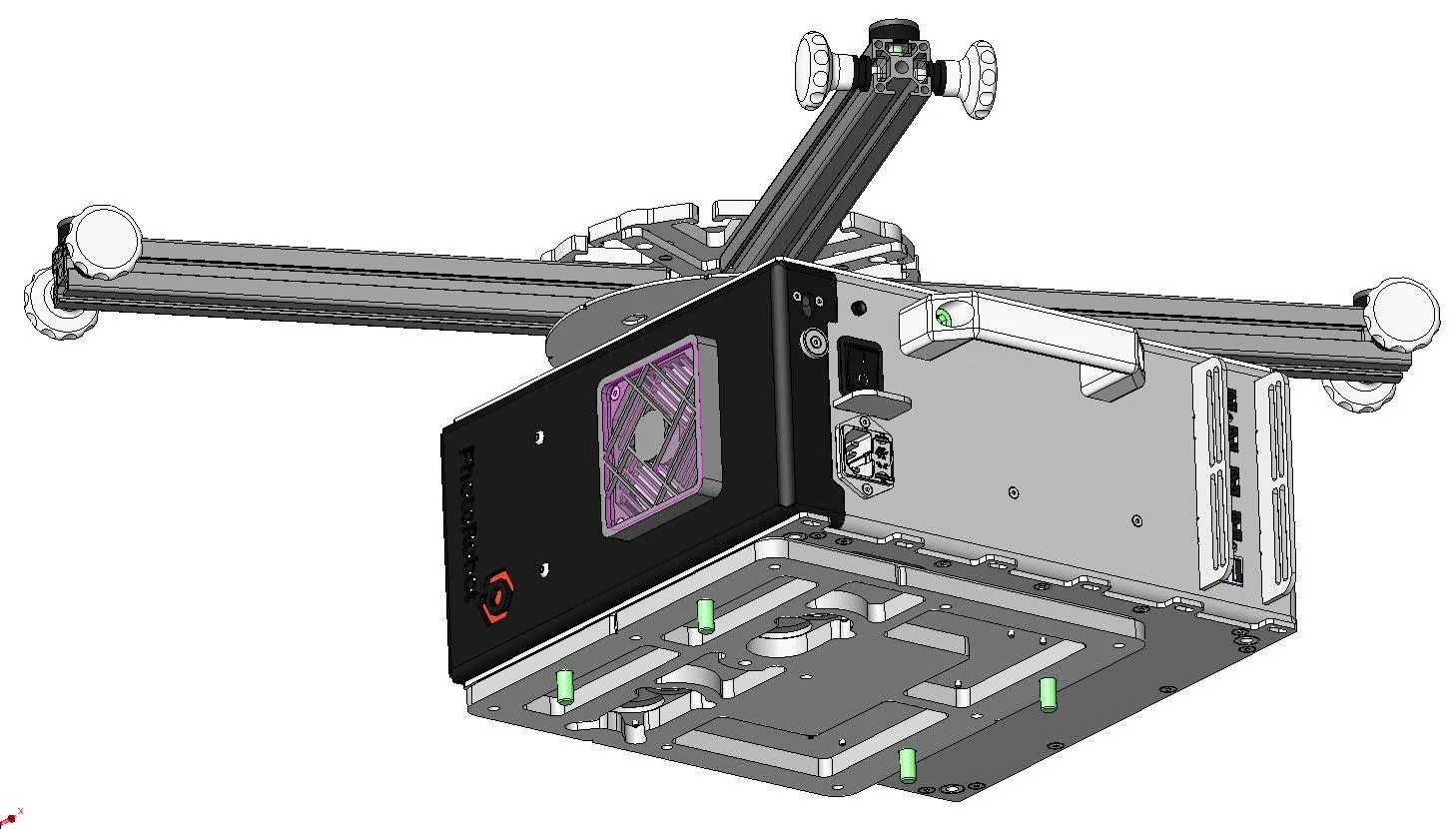
d) Mode de suspensió rotativa 360 (muntatge cap per avall a un portal superior):




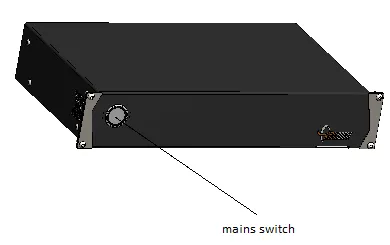
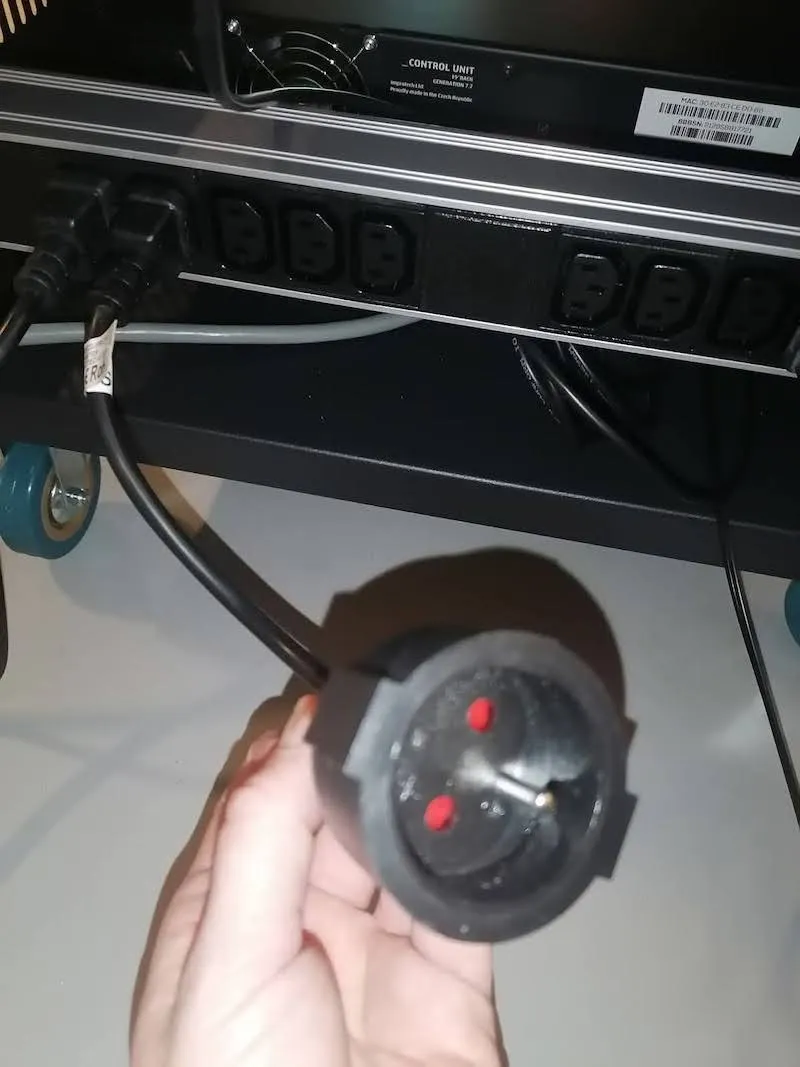
1.5. Parada d'emergència compacta del cub
Per realitzar una parada d'emergència, desconnecteu el dispositiu de la xarxa elèctrica tirant del cable d'alimentació de la presa.
1.6. Cub V5 / V6 / Manteniment compacte
Tingueu en compte que cal mantenir el dispositiu net i en un entorn sec i climatitzat amb una temperatura constant. Traieu la pols només amb un drap humit i no utilitzeu productes químics ni dissolvents per a cap neteja.
Per disseny, l'equip ha d'estar subjecte a inspeccions i revisions periòdiques segons la legislació local. Un cop finalitzat el seu cicle de vida, l'equip elèctric s'ha d'eliminar adequadament per lliurar-lo al sistema de recollida de residus electrònics dictat per la legislació local.
2. Primer ús: PhotoRobot Cube V5 / V6 / Compact
Abans del primer ús de PhotoRobot, cal entendre el concepte darrere de la tecnologia. PhotoRobot és una solució revolucionària tot en un per a l'automatització de la fotografia de productes i objectes. Des d'un punt de vista tècnic, és una unitat modular formada per maquinari i programari. Per tant, és necessari que el propi PhotoRobot estigui connectat a la mateixa xarxa que l'ordinador que l'opera. La xarxa també ha de tenir una connexió a Internet per accedir als serveis de PhotoRobot, que s'executen al núvol. A continuació, hi ha els següents requisits que sempre s'han de complir.
- Hi ha d'haver una unitat de control PhotoRobot connectada a la xarxa local.
- Es necessita un ordinador per executar la GUI de servei o el programari de l'operador anomenat _Controls.
- L'ordinador ha d'estar connectat a la mateixa xarxa que la unitat de control PhotoRobot.
- La xarxa ha d'estar connectada a Internet.
Després d'assegurar-vos la connexió de PhotoRobot a l'ordinador i a la xarxa local, comproveu els paràmetres del sistema de distribució d'electricitat (per exemple, tensió i freqüència).
A continuació, comproveu la configuració d'alimentació de la unitat de control. Ha de complir tots els paràmetres del sistema de distribució d'electricitat. Si la configuració de la unitat de control no compleix, consulteu la següent secció sobre Configuració d'alimentació de la unitat de control.
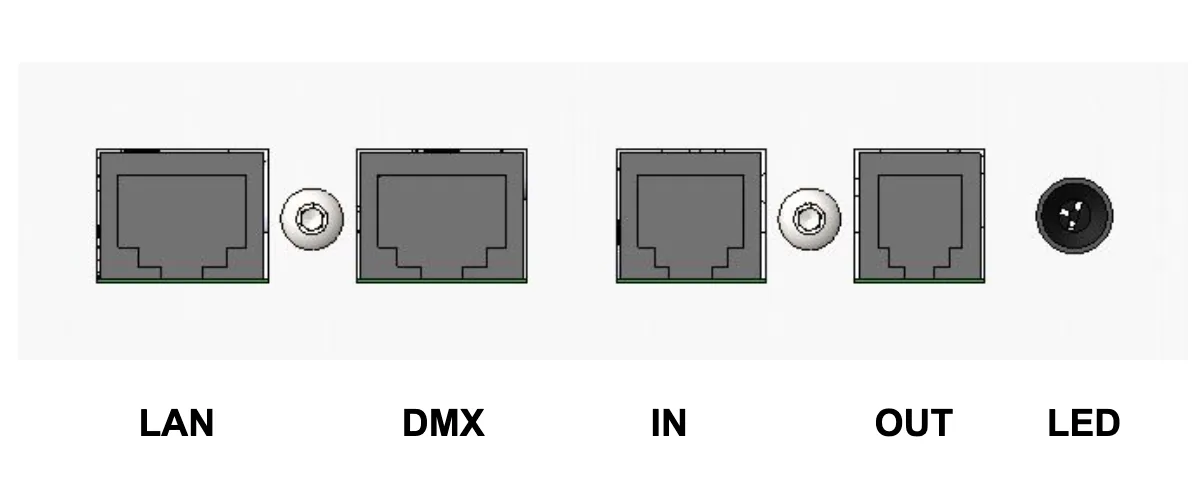
Si compleix, continueu connectant la unitat de control a la xarxa mitjançant un cable ethernet.
Nota: Per als models Cube V5 / V6, la unitat de control és un dispositiu independent. Cerqueu el connector RJ45 a la part posterior de la unitat de control. El Cube Compact té la Unitat de Control integrada a la màquina. Cerqueu el connector RJ45 a la part posterior del robot Cube.
2.1. Configuració d'alimentació de la unitat de control
Per comprovar la configuració d'alimentació de la unitat de control, la unitat de control del model anterior té un selector de tensió manual a la part posterior del dispositiu.

Alternativament, la unitat de control del model més nou no té selector de tensió i té un rang de funcionament funcional de 110 V - 240 V.
Si no esteu segur de la configuració d'alimentació de la unitat de control, poseu-vos en contacte amb l'assistència tècnica de PhotoRobot per obtenir ajuda d'un tècnic especialitzat de PhotoRobot.
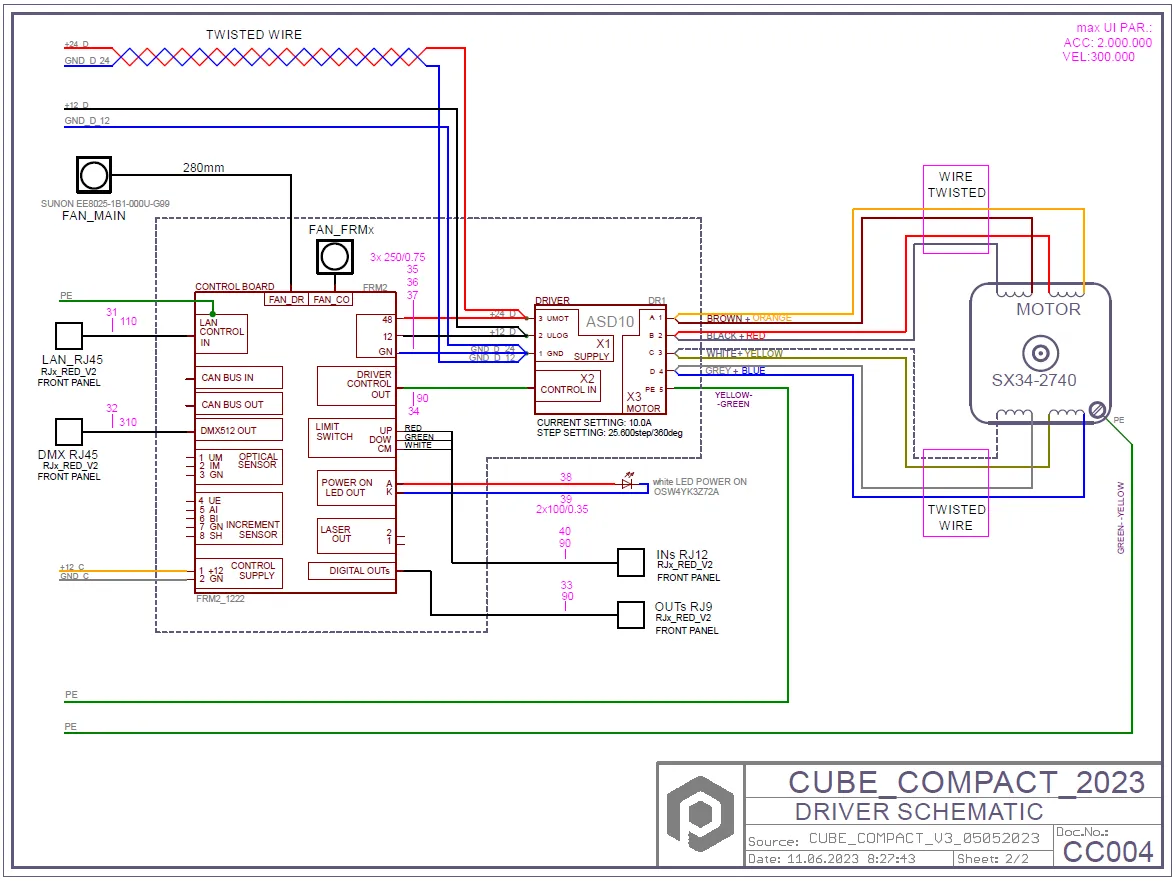
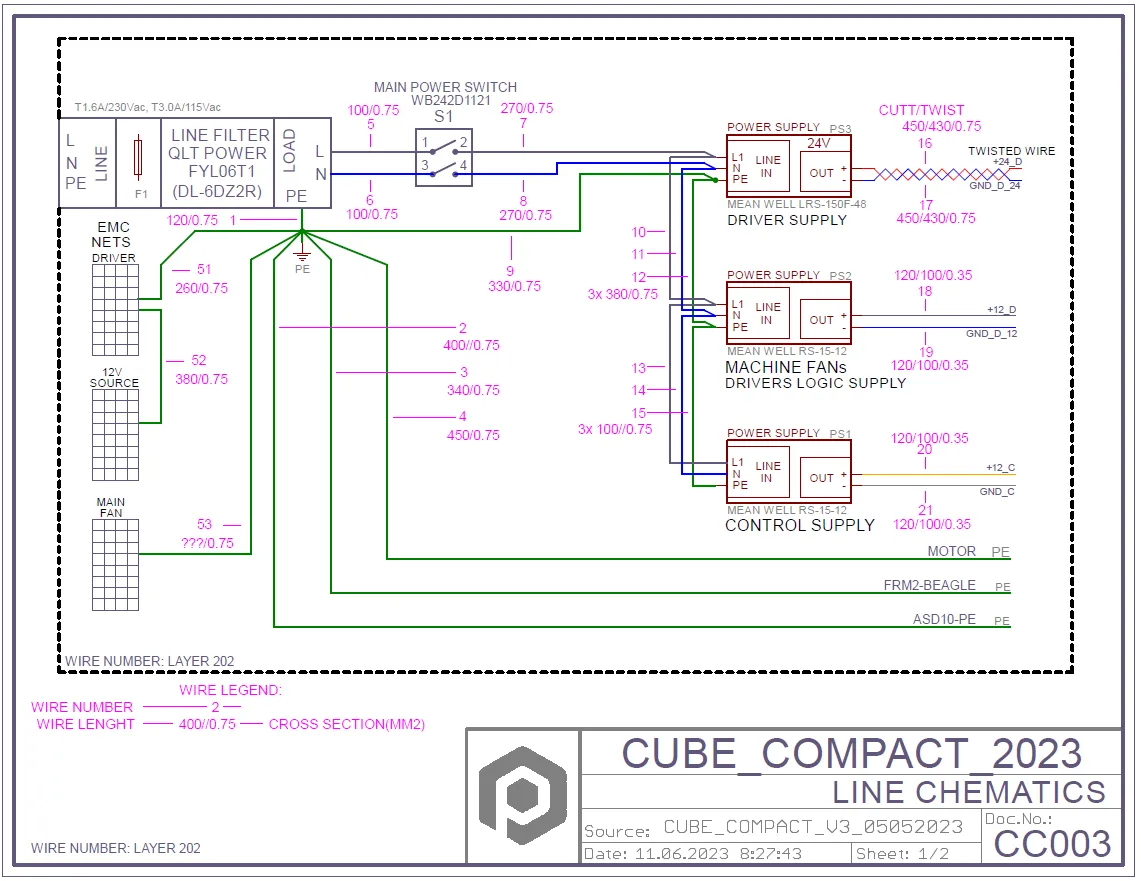
2.2. Esquema elèctric compacte del cub
2.3. Configuració de la xarxa
Per configurar la xarxa per comunicar-se correctament amb PhotoRobot, s'han de complir els requisits següents a la xarxa.
- Un servidor DHCP a la xarxa és obligatori.
- S'ha de permetre la comunicació dels ports TCP 7777, 7778.
- S'han de permetre les emissions UDP al port 6666
- La connexió a Internet és obligatòria.
- *. photorobot.com s'ha de permetre l'accés.
- as-unirobot.azurewebsites.net s'ha de permetre l'accés.
- Es recomana la connexió per cable de PhotoRobot a la LAN.
- Consulteu PhotoRobot Detailed Network Prerequisits per obtenir més informació si cal.
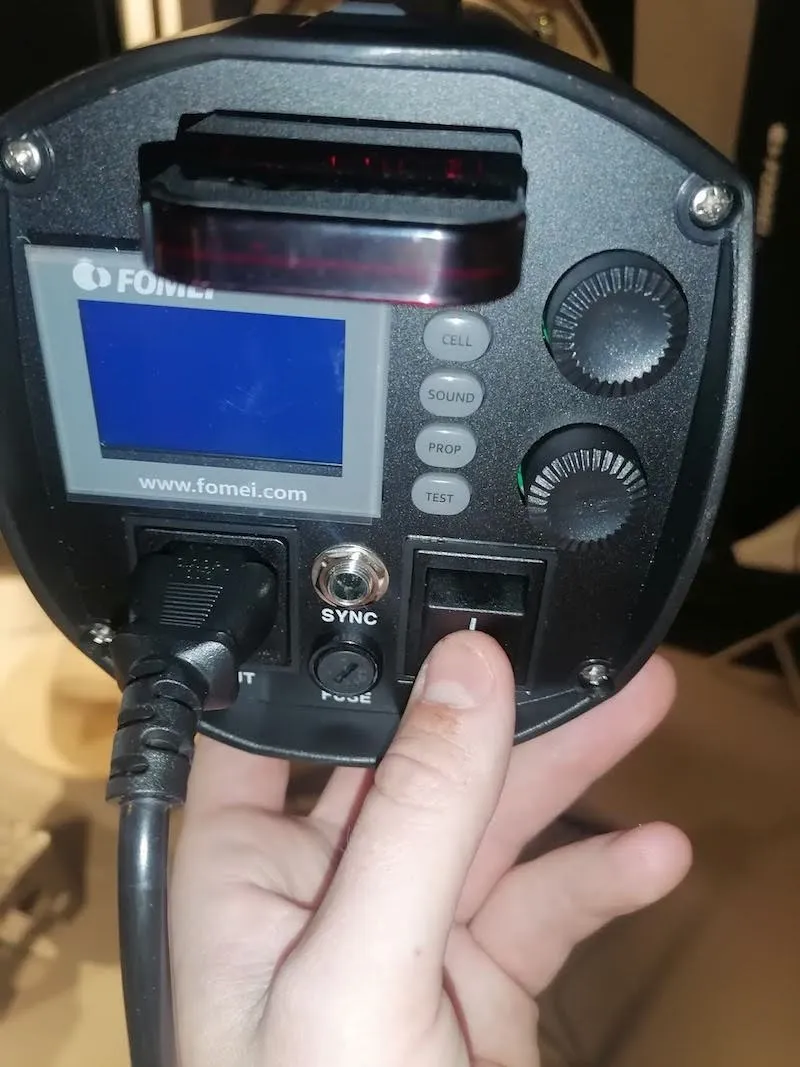
- Connecteu l'endoll a la presa de corrent.
A continuació, premeu l'interruptor de xarxa de la unitat de control del Cube V5 / V6 (o a la part posterior del Cube Compact). La llum d'estat canviarà de parpellejant a llum contínua per indicar quan estigui llesta per funcionar.
2.4. Cerqueu l'adreça IP de PhotoRobot a la LAN
Després d'una configuració adequada de la xarxa, cal cercar i identificar l'adreça IP de PhotoRobot a la LAN. Per fer-ho, l'aplicació PhotoRobot Locator s'integra directament dins de CAPP per facilitar la cerca i identificació de les Unitats de Control a la xarxa. Assegura't d'utilitzar la versió més actualitzada de CAPP per accedir a aquesta funció.
Després, per identificar un robot a la xarxa directament dins de CAPP, obre la versió local de CAPP, ves a Configuració i fes clic a Robots / Unitats de control.

El menú Robots / Unitats de Control mostra columnes amb Nom, Xarxa, Unitat, Versió, Descobert i Identificació per a cada robot. Si el punt a l'esquerra del nom del robot és verd, està en línia. Fer clic al camp del robot s'obrirà la interfície web del robot. Això també farà que la llum LED de la unitat de control del robot parpellegi en verd per facilitar la seva identificació.
Si el client requereix descàrrega externa de l'aplicació, PhotoRobot Locator també està disponible per a descàrrega a iOS dins de les Descàrregues de Comptes PhotoRobot.

Nota: La versió per a Android de PhotoRobot Locator ha estat descontinuada.
Alternativament, hi ha la utilitat de línia de comandes FRFind per a MacOS o Windows per cercar a la xarxa i identificar unitats de control PhotoRobot. Troba enllaços per descarregar FRfind també a la pàgina de Descàrregues de Comptes de PhotoRobot.
2.5. Proves bàsiques - Cub V5 / V6 / Compacte
Per provar el Cube V5 / V6 / Compact, obriu un navegador web i introduïu l'adreça IP associada al vostre PhotoRobot en format URL. Per exemple, introduïu: https://11.22.33.44 (tot i que tingueu en compte que aquesta adreça és només un exemple). Si té èxit, s'iniciarà una interfície d'usuari bàsica.

- Engegueu els motors (fletxa 1 a dalt) i intenteu operar qualsevol part mòbil del robot (fletxa 2 a dalt). Si el robot es mou segons les vostres instruccions, esteu preparat per utilitzar el vostre dispositiu PhotoRobot regularment.
3. Conjunt de cub V5 / V6 i suport de tors de maniquí
Quan munteu els models Cube V5 o Cube V6, tingueu en compte que és necessari muntar la unitat de control i el bastidor independents. Aquest no és el cas del Cube Compact. Si utilitzeu el Cube Compact, aneu a la secció sobre el muntatge del fons del paper.
3.1. Muntatge de bastidor HD i unitat de control (V5 / V6)
3.1.1. Per muntar la unitat de control separada del Cube V5 i el Cube V6, comenceu amb el muntatge del bastidor. Per a això, seguiu les instruccions del manual adjunt a la caixa del bastidor al lliurament.

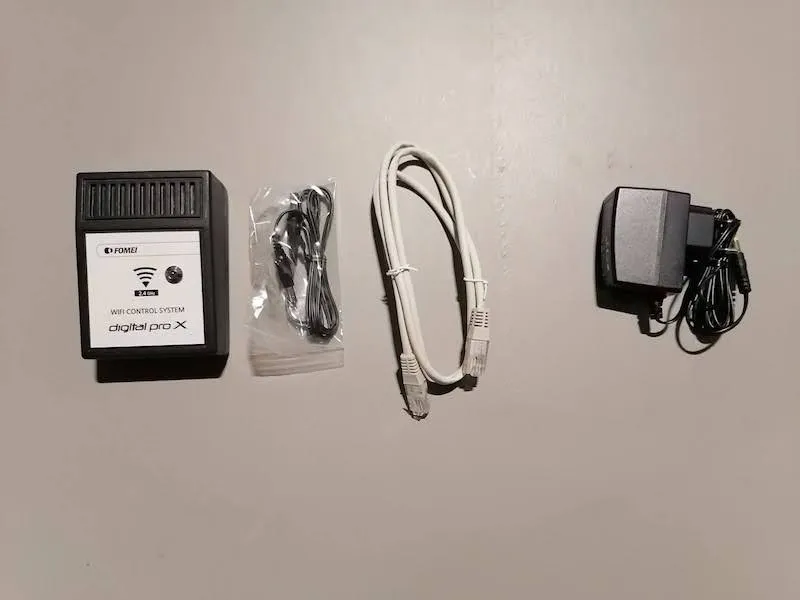
3.1.2. A continuació, localitzeu i desembaleu la Unitat de Control de la seva caixa d'enviament de cartró.

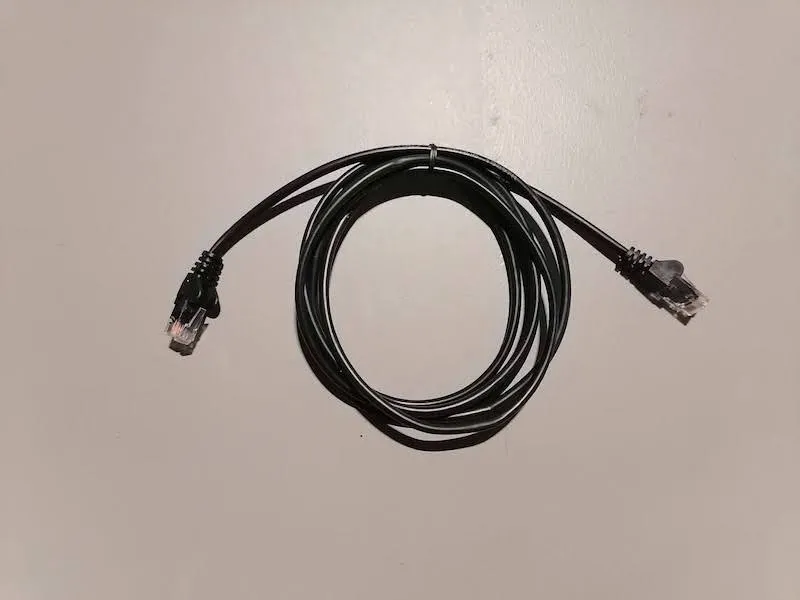
3.1.3. A continuació, prepareu els cables següents: el cable d'alimentació (1 metre de longitud), el cable de l'obturador, el cable del motor i el cable ethernet (2 metres de longitud).
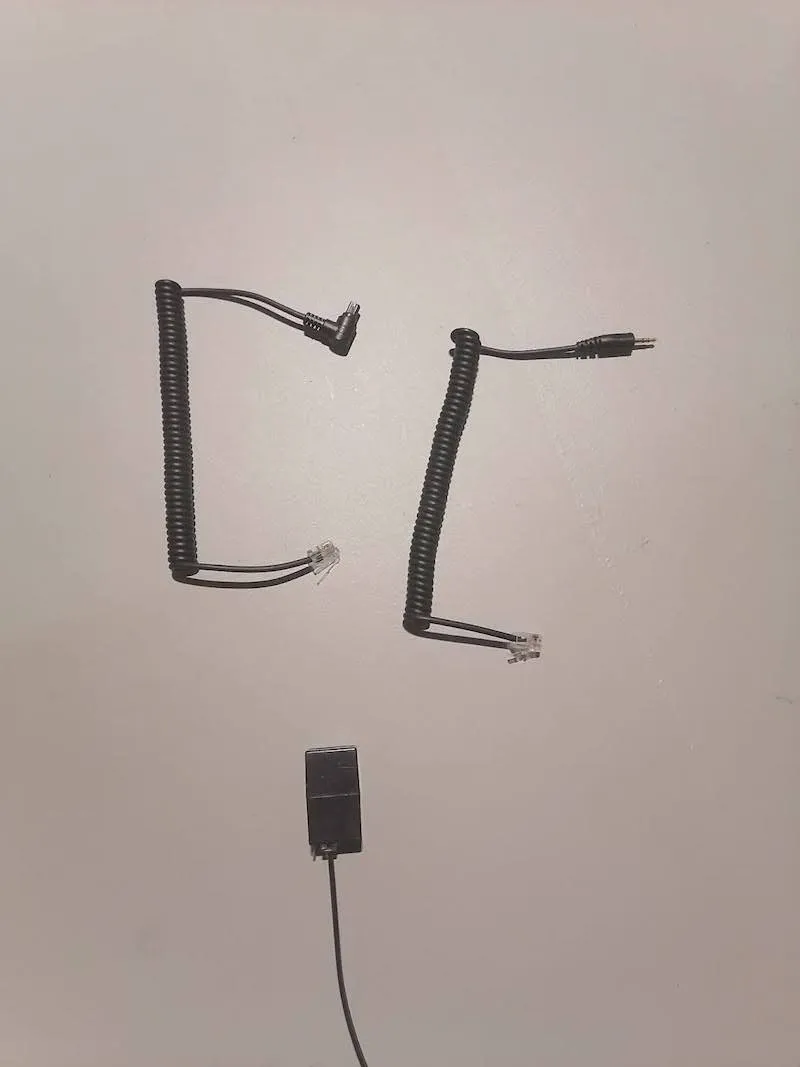
a) Cable d'alimentació (1 metre de longitud):

b) Cable de l'obturador (1 metre de longitud):

c) Cable del motor:

d) Cable Ethernet (2 metres de longitud):
3.1.4. Col·loqueu cada cable preparat en el pas anterior al bastidor.
3.1.5. Connecteu els cables dels passos anteriors a la unitat de control.

Important: El cable del motor s'ha de subjectar bé mitjançant els dos cargols del connector. El cable de l'obturador es connecta al port OUT de la unitat de control.
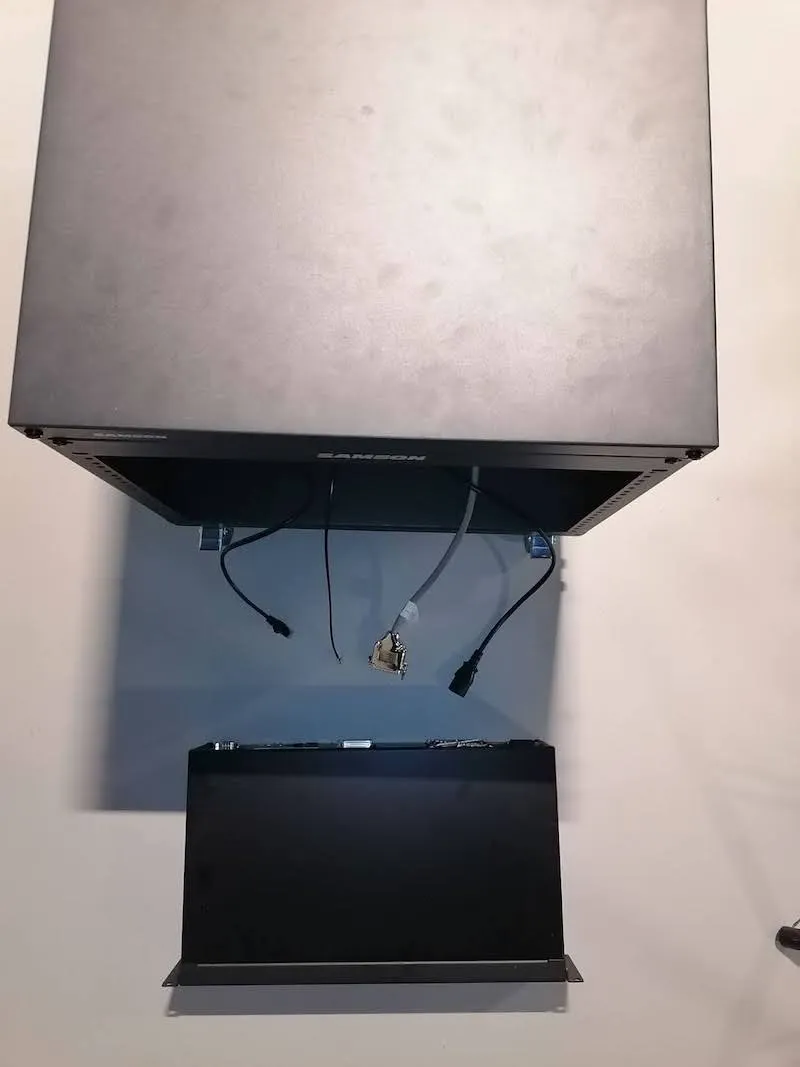
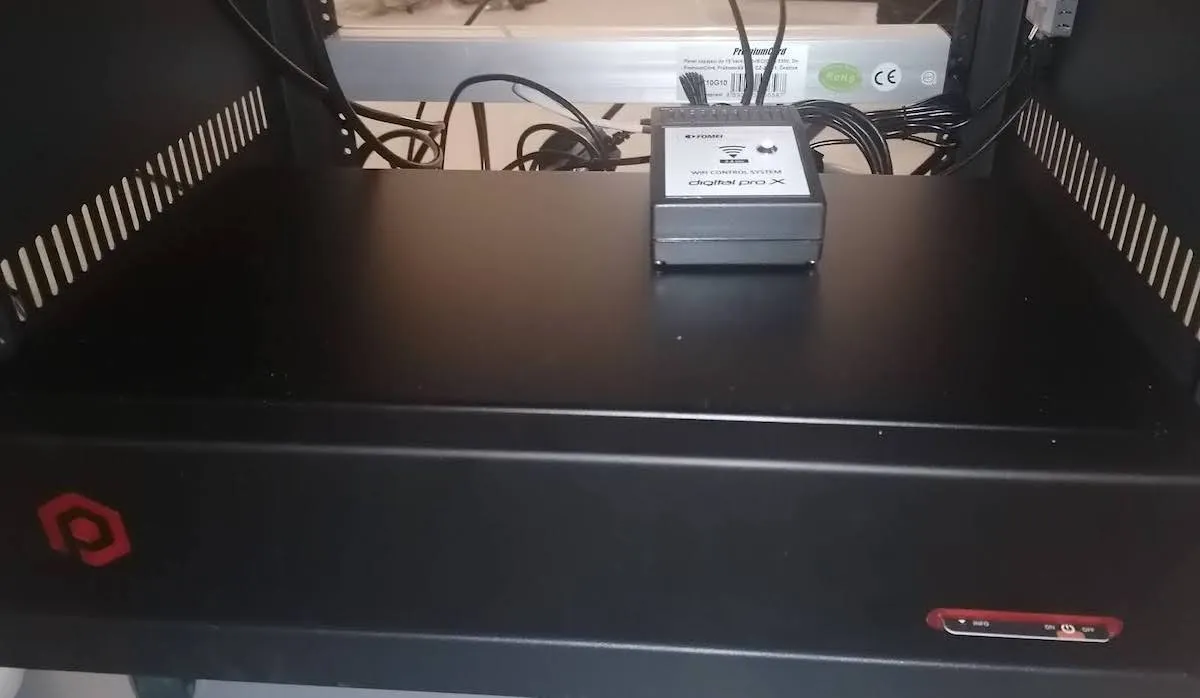
3.1.6. Introduïu la unitat de control a la caixa del bastidor i fixeu els cargols per segellar-la.
3.2. Muntatge d'accessoris i connexions
3.2.1. Per connectar tots els accessoris del Cube V5 / Cube V6, comenceu desempaquetant l'encaminador de la caixa de cartró i, a continuació, munteu els suports del bastidor. A continuació, connecteu els cables d'alimentació o l'adaptador (segons el tipus d'encaminador) i introduïu l'encaminador a la caixa del bastidor abans de cargolar-lo.

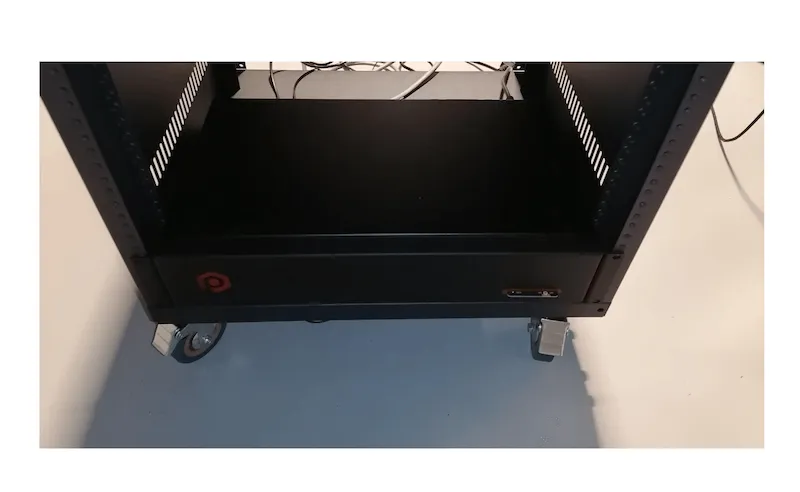
3.2.2. Fixeu la presa múltiple d'alimentació a la part inferior de la part posterior del bastidor fixant-la amb cargols.
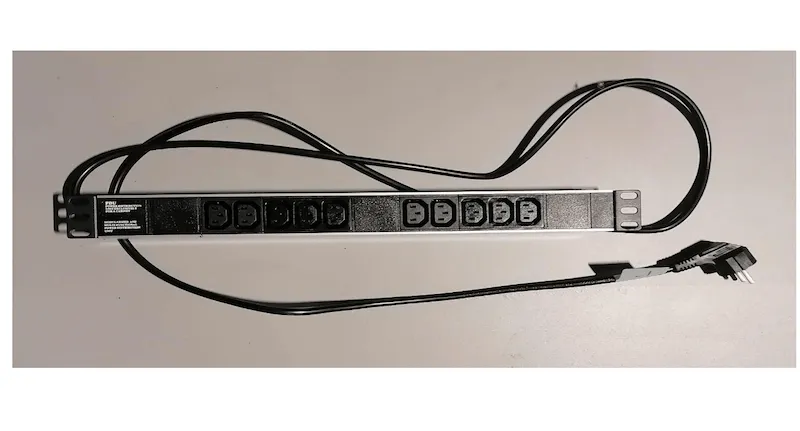

3.2.3. Si l'encaminador lliurat té un adaptador d'alimentació, cerqueu la interfície de l'adaptador d'alimentació i connecteu-lo a qualsevol connector de sòcol múltiple d'alimentació.



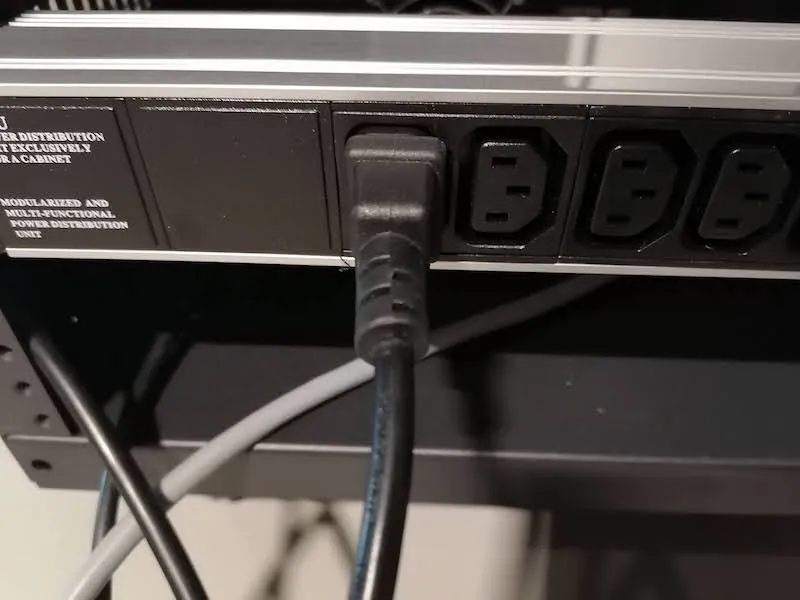
3.2.4. Cerqueu l'extrem lliure del cable d'alimentació de la unitat de control i connecteu-lo a la presa múltiple d'alimentació.
3.2.5. Amb el cable Ethernet més llarg, connecteu el cable a la presa de paret de dades del vostre estudi. Tingueu en compte que, per defecte, s'espera que l'accés a Internet estigui disponible a través d'aquesta presa de dades i, per tant, l'adreça IP s'obtindrà automàticament.


3.2.6. Connecteu l'altre extrem del cable Ethernet a l'últim port de l'encaminador. Utilitzeu el port número 10 o el port número 13, segons el tipus d'encaminador.
3.2.7. A continuació, connecteu l'extrem lliure del cable ethernet de la unitat de control a l'encaminador mitjançant qualsevol port número 1-9.
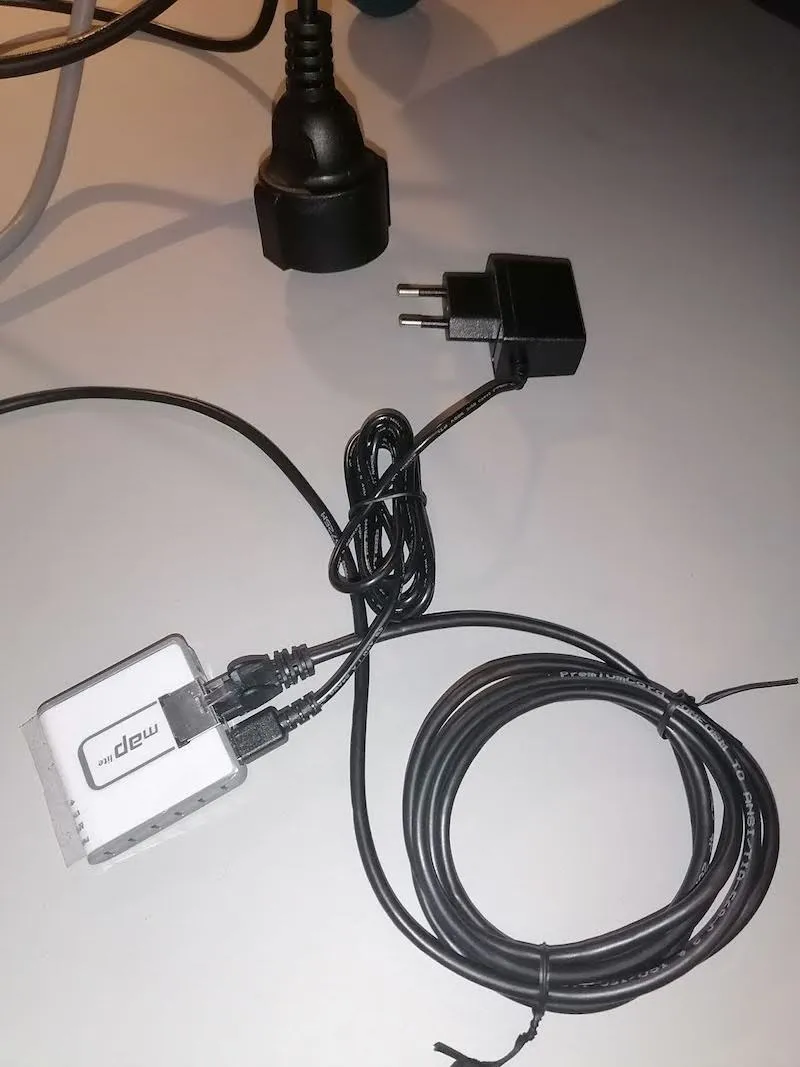
3.2.8. Cerqueu la interfície de l'adaptador de corrent i connecteu-la a la presa múltiple d'alimentació.
3.2.9. Desempaqueteu el mòdul Wi-Fi de la caixa de cartró i cerqueu un altre cable Ethernet de 2 metres per connectar-lo al mòdul Wi-Fi. L'altre extrem del cable Ethernet es connecta a l'encaminador mitjançant qualsevol port número 1-9.



3.2.10. A continuació, si utilitzeu estroboscòpics Fomei, desempaqueteu el convertidor Wi-Fi i l'adaptador de corrent Fomei i connecteu els dispositius. Si utilitzeu llums Broncolor, consulteu PhotoRobot - Gestió de llums Broncolor.

3.2.11. Connecteu la interfície de l'adaptador d'alimentació a la presa múltiple d'alimentació i, a continuació, connecteu l'adaptador. L'altre extrem del cable es connecta a l'encaminador mitjançant qualsevol port número 1-9.

3.2.12. Connecteu l'endoll de la presa múltiple d'alimentació a la presa de corrent.

3.2.13. Cerqueu la variant de terminació del cable de l'obturador passa al vostre model de càmera i connecteu-la a l'acoblador del cable de l'obturador.


3.3. Muntatge del fons del paper
3.3.1. Per muntar el fons del paper, primer trobeu dos suports de llum Master LS 13-B. A continuació, munteu forquilles de fixació W-2 per al conjunt de tacs expansors a la part superior de cada suport.



3.3.2. Col·loqueu el fons de paper amb el tac col·locat a les forquilles de fixació dels dos trípodes. Un contindrà el costat esquerre del fons i l'altre el costat dret del fons.

3.3.3. A continuació, mireu la gravació de pantalla de la instal·lació del conjunt de tacs i repetiu els passos del vídeo.

3.4. Muntatge del robot Cube V5 / V6
3.4.1. Per configurar el robot Cube per suportar el suport del tors del maniquí giratori, comenceu desempaquetant el robot i fixant les seves quatre potes a la part inferior del dispositiu.


3.4.2. A continuació, connecteu l'altre extrem del cable del motor al cub, fixant els dos cargols al connector.


3.4.3. Després de connectar el dispositiu, col·loqueu el robot Cube a terra al centre del fons blanc. Col·loqueu el cub a 1 metre del paper.
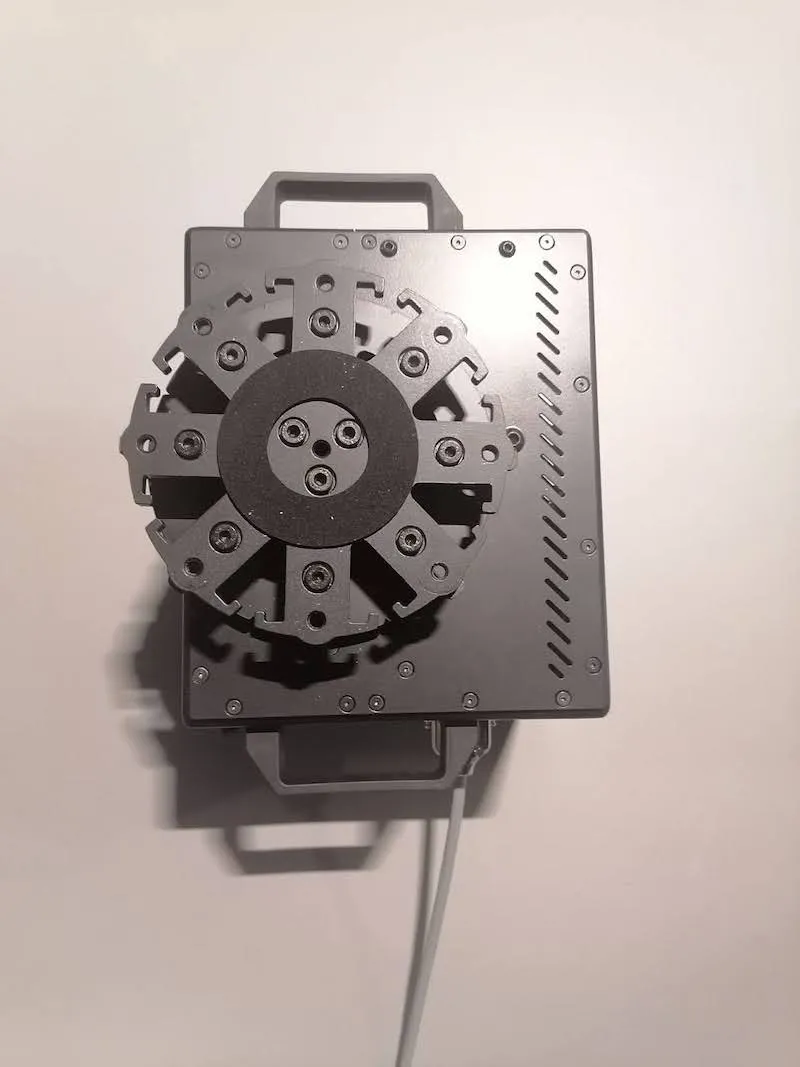

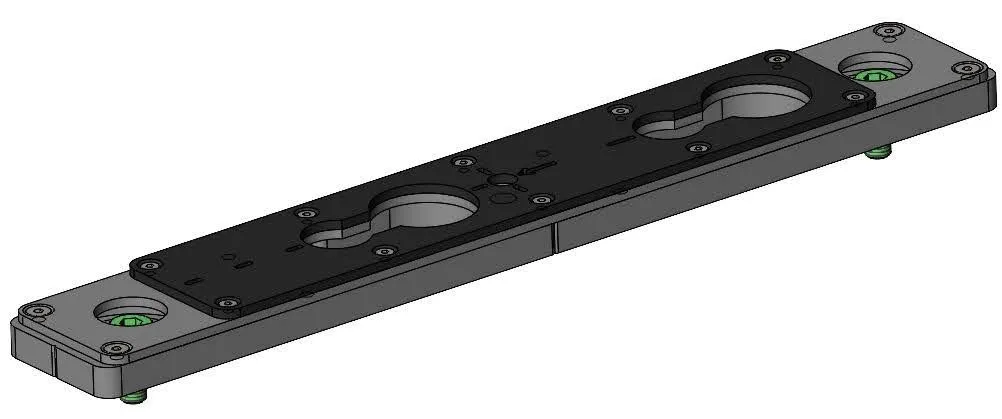
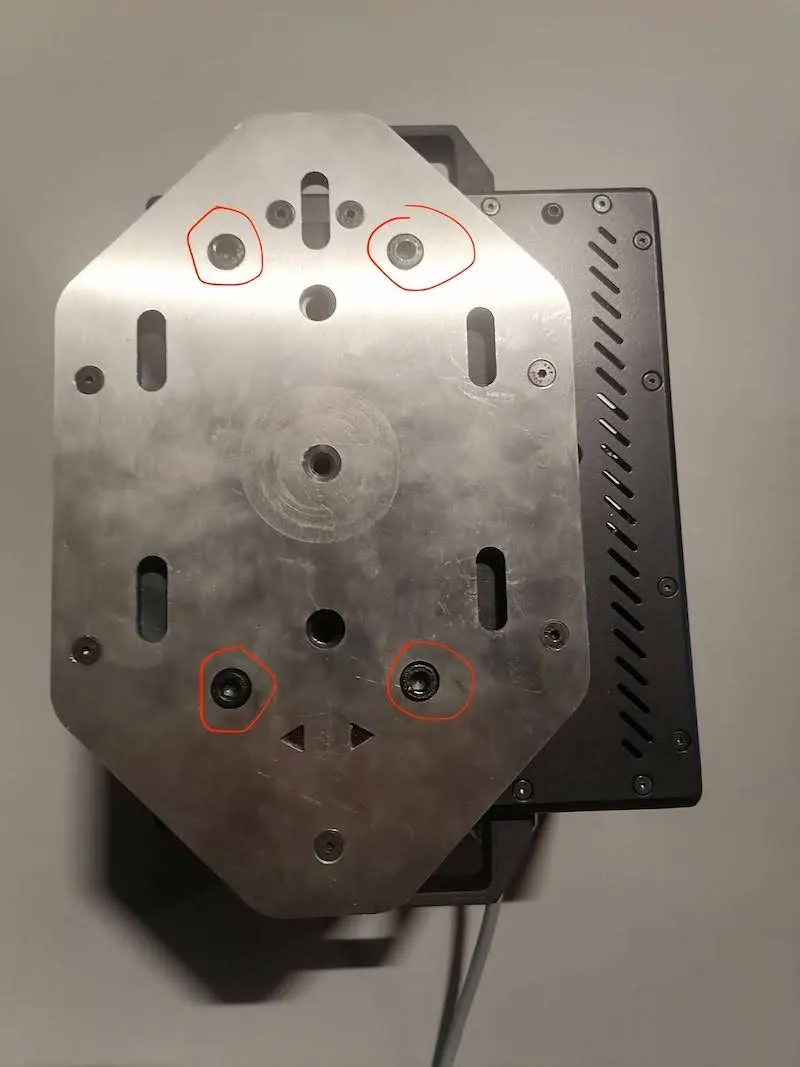
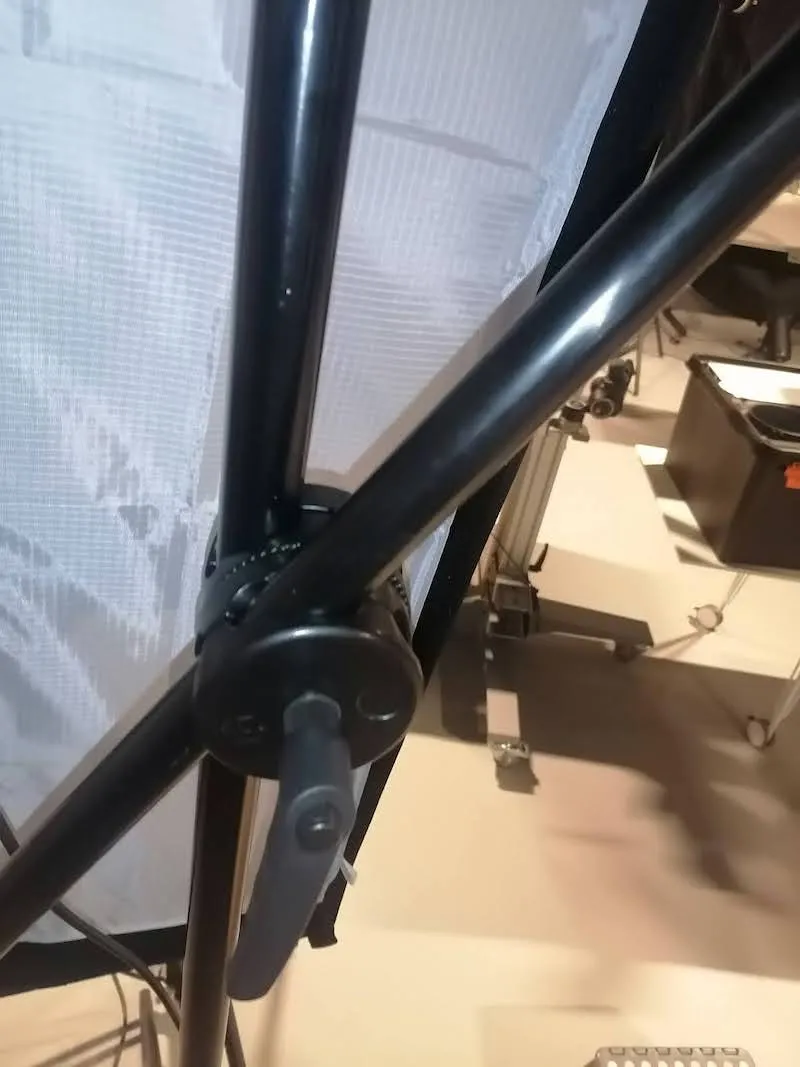
3.4.4. Col·loqueu la placa reductora del suport del tors a la part superior del robot Cube i fixeu-la al seu lloc amb els quatre cargols proporcionats.
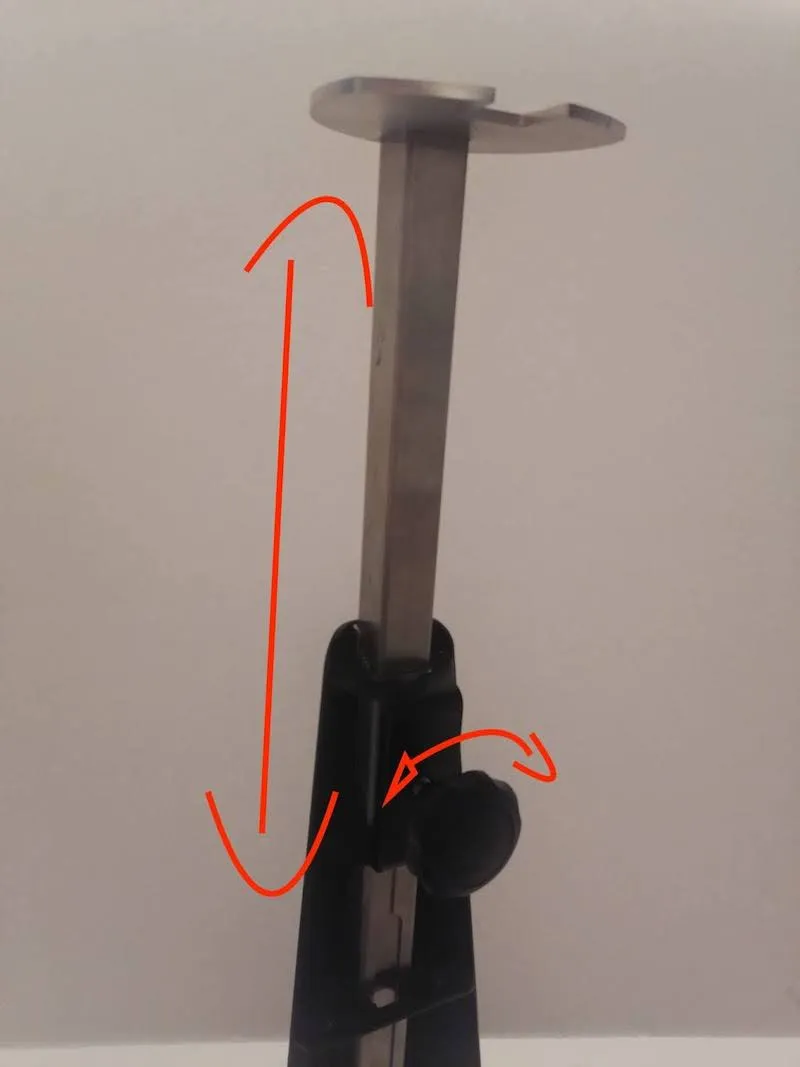
3.4.5. Col·loqueu el cos del suport del tors sobre la placa reductora i fixeu el suport del tors al seu lloc amb el cargol de mà gran.


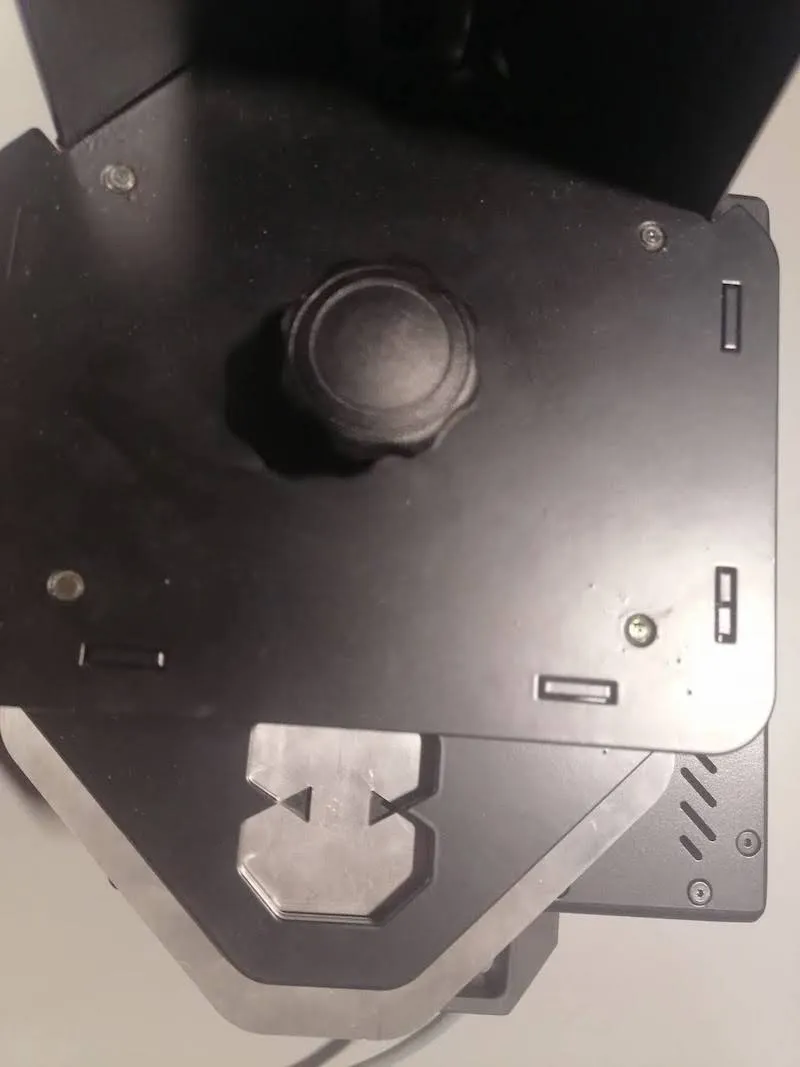
Important: Cal prestar molta atenció a aquest pas. Assegureu-vos que els símbols del triangle de la placa de reducció siguin visibles a través del suport del tors. Això vol dir que el suport del tors s'ha instal·lat correctament.
3.4.6. En aquest punt, tingueu en compte que l'alçada del tors es pot ajustar afluixant i estrenyent el cargol de mà i lliscant l'extensió cap amunt o cap avall.
3.5. Configuració de llums de flaix
3.5.1. Per configurar les llanternes amb el robot Cube, primer desempaqueteu les llanternes de la caixa i, a continuació, introduïu la bombeta pilot a cada llanterna.


Nota: Per inserir la bombeta pilot, desenrosqueu amb cura el vidre de la xarxa principal. A continuació, feu el mateix amb el protector de vidre de la bombeta principal, abans de treure la bombeta pilot de la caixa de cartró. Assegureu-vos d'utilitzar un tovalló o un drap quan manipuleu la bombeta pilot, en cas contrari, la seva vida útil pot disminuir dràsticament. A continuació, introduïu la bombeta pilot a la connexió en la posició exacta com a les fotos següents.




Quan estigueu a punt, recordeu tornar a posar el protector de vidre i, a continuació, repetiu els passos anteriors per muntar cada llum.

3.5.2. Després de configurar les bombetes pilot i substituir els protectors de vidre, connecteu els cables d'alimentació a tots els llanternes.


3.5.3. A continuació, introduïu receptors a cada llum i tingueu en compte les etiquetes FOMEI per a l'orientació.


3.5.4. Connecteu els extrems lliures dels cables d'alimentació dels llums a la presa múltiple d'alimentació.


3.5.5. Enceneu l'alimentació de tots els llums de llanterna.

3.5.6. Col·loqueu els llums físicament al voltant del robot en la següent configuració de llums recomanada.
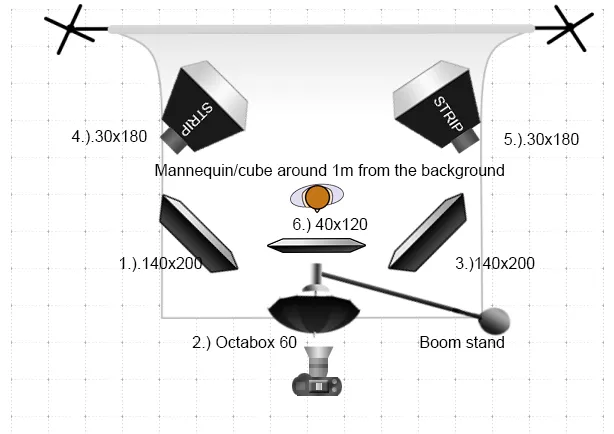
3.5.7. Tingueu en compte que si s'instal·la un suport de pluma com en la configuració recomanada de llums, caldrà construir primer el suport de la pluma. Per construir un suport de pluma, necessitareu un trípode, un pal de paret d'1,5 metres i un conjunt de plumes de paret.



A més, consulteu les imatges següents per a la construcció del suport de la pluma.
a) Pinça de pal de la pluma de paret:
b) Equilibri de pes a l'extrem del pal per suportar la llum:

c) Imatge il·lustrativa d'un suport de pluma construït:

4. Programari PhotoRobot _Controls
L'aplicació PhotoRobot _Controls programari proporciona control sobre tota l'estació de treball robòtica Cube V5 / V6 / Compact. Això inclou el control remot de tots els robots, càmeres i il·luminació. El programari gestiona el flux de treball i proporciona la funcionalitat necessària per a una automatització eficaç en el camp del postprocessament.
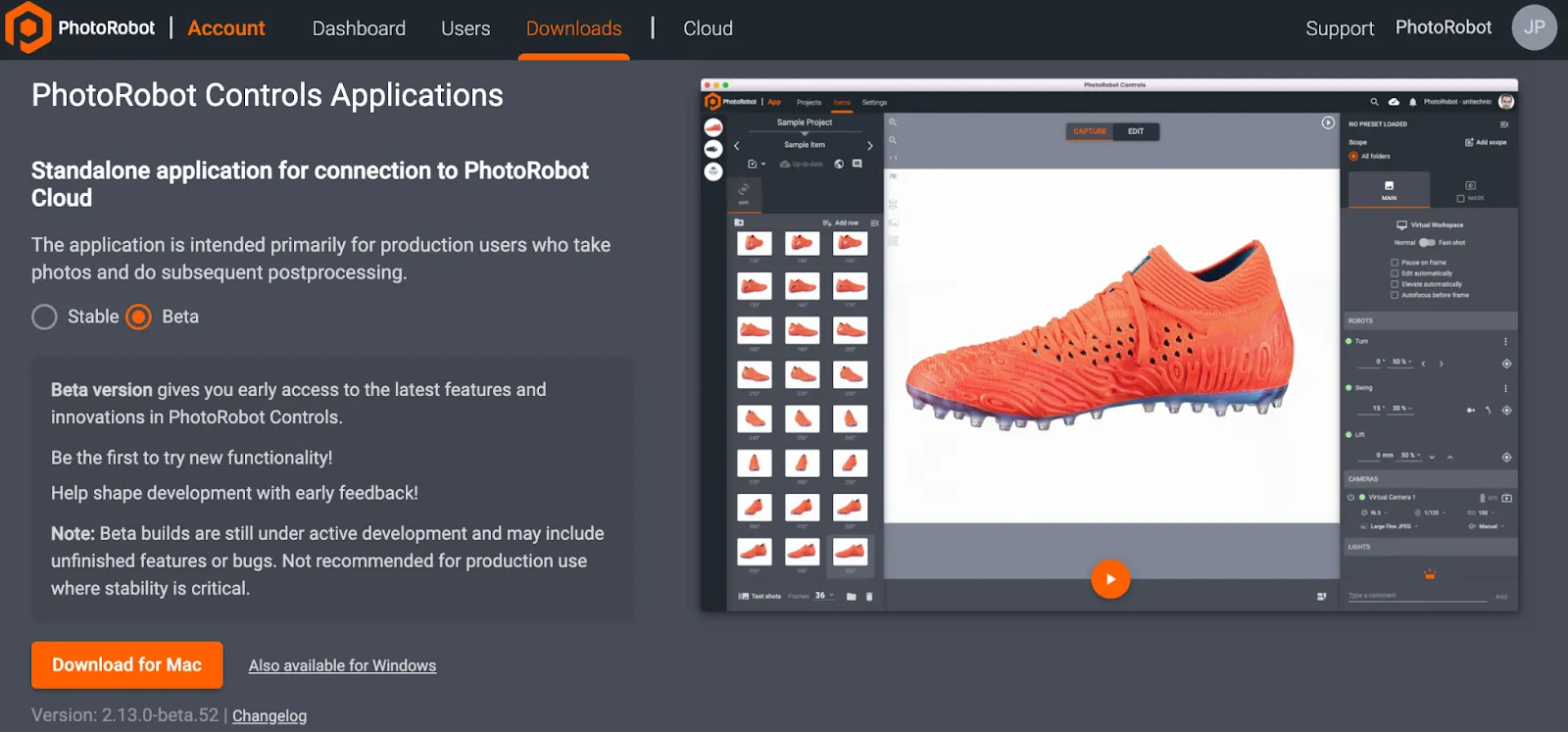
PhotoRobot _Controls programari de l'aplicació es pot descarregar a través del vostre compte PhotoRobot. No està inclòs amb el lliurament de la màquina. PhotoRobot _Controls programari de l'aplicació es compra per separat de l'equip.
A més, després d'iniciar l'aplicació de programari, tingueu en compte que la interfície podria iniciar-se automàticament en "mode assistent". El mode assistent és una interfície d'usuari simplificada. Permet, per exemple, escanejar codis de barres per identificar objectes i iniciar les seqüències de captura i postprocessament automàticament.
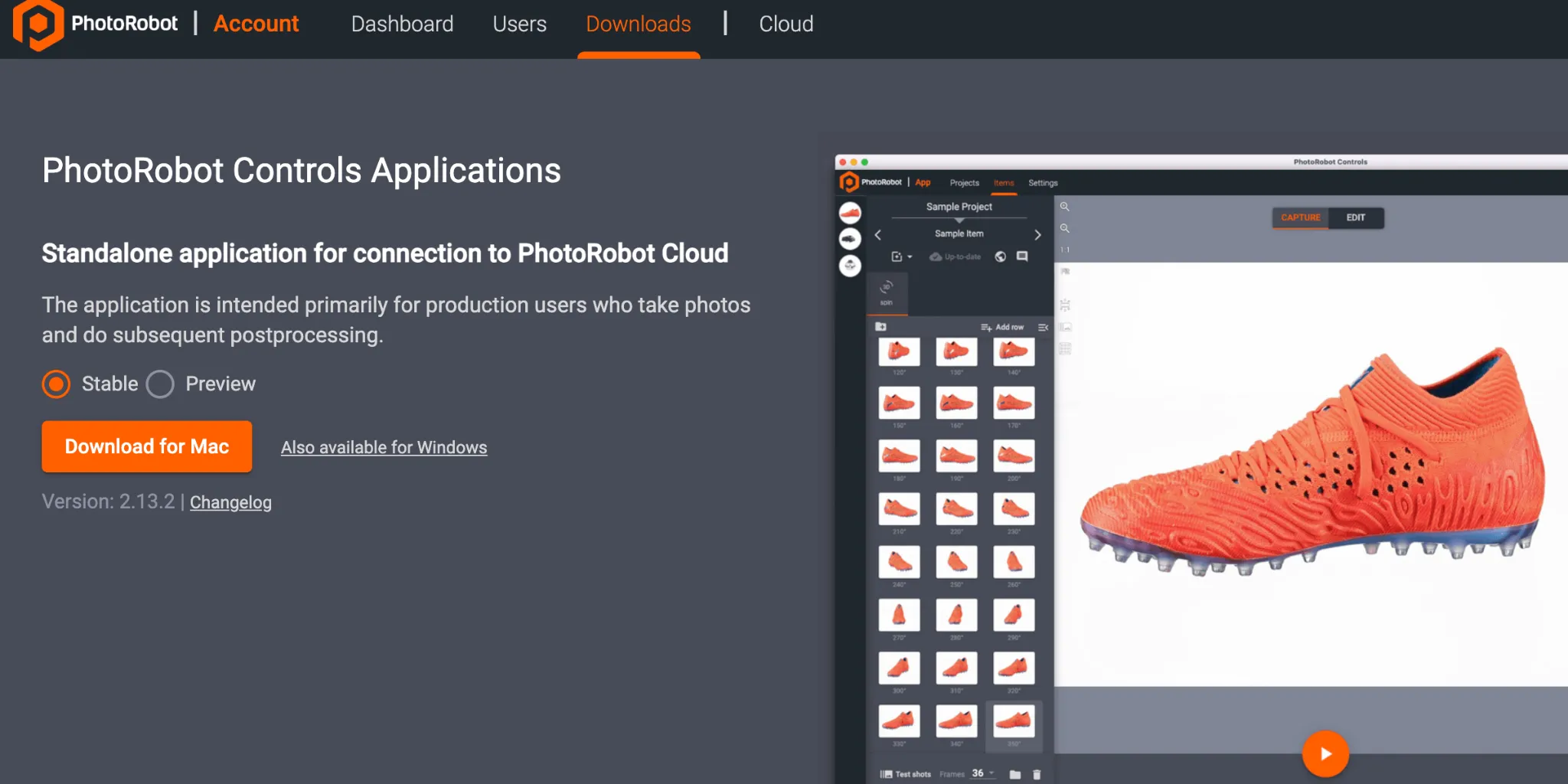
Nota: Tant la versió estable com una versió prèvia de CAPP estan disponibles per descarregar mitjançant l'assistent d'instal·lació. La versió estable conté la versió més recent de CAPP i rep versions freqüents. Mentrestant, la versió prèvia de CAPP proporciona accés anticipat a les últimes funcions i correccions que es transfereixen a la versió estable als pocs dies del desenvolupament. Això permet als usuaris provar qualsevol problema que es produeixi a la versió de visualització prèvia abans de contactar amb el suport, ja que la majoria dels problemes notificats a la versió estable ja s'han resolt a la versió de visualització prèvia. Tanmateix, tingueu en compte que la versió de vista prèvia no es recomana per a ús en producció en què l'estabilitat és un factor crític. La versió de vista prèvia està en desenvolupament actiu, que encara pot incloure característiques incompletes o errors no resolts.
Important: Les versions anteriors de CAPP no estan pensades per a la distribució pública o de clients a causa del risc de corrupció de la base de dades. Les versions anteriors de CAPP només són accessibles per als tècnics autoritzats de PhotoRobot per al desenvolupament intern o per a casos d'ús extremadament especials. Per trobar la versió estable més recent i la versió prèvia de CAPP, consulteu les últimes versions de descàrrega de CAPP.
Per obtenir assistència o resolució de problemes de PhotoRobot _Controls aplicació, consulta PhotoRobot Introducció.
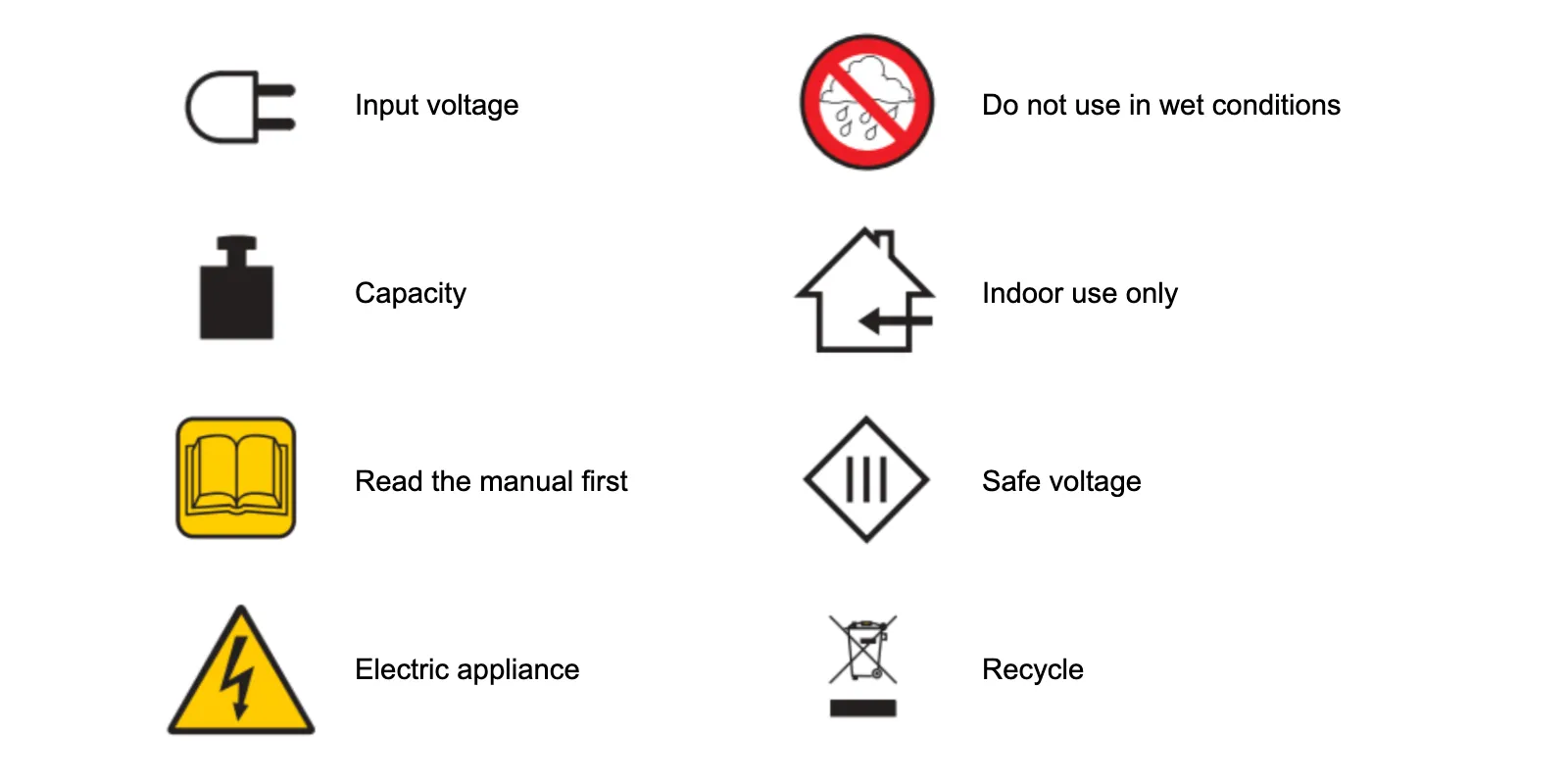
5. Etiquetes d'informació
5.1. Visió general dels símbols
5.2. Etiquetes compactes de cub



Sèrie EOS Rebel


Sèrie EOS DSLR


Sèrie sense mirall EOS M


Sèrie PowerShot


Primer pla / De mà

La sèrie Canon EOS Rebel ofereix càmeres DSLR aptes per a principiants amb una qualitat d'imatge sòlida, controls intuïtius i funcions versàtils. Ideals per als entusiastes de la fotografia, aquestes càmeres ofereixen un enfocament automàtic fiable, pantalles tàctils d'angle variable i gravació de vídeo Full HD o 4K.
Connexió
Resolució (MP)
Resolució
La sèrie Canon EOS DSLR ofereix imatges d'alta qualitat, enfocament automàtic ràpid i versatilitat, la qual cosa la fa ideal tant per a la fotografia com per a la producció de vídeo.
Connexió
Resolució (MP)
Resolució
La sèrie Canon EOS M Mirrorless combina un disseny compacte amb un rendiment similar a la DSLR. Amb lents intercanviables, enfocament automàtic ràpid i sensors d'imatge d'alta qualitat, aquestes càmeres són ideals per a viatgers i creadors de contingut que busquen portabilitat sense sacrificar la qualitat de la imatge.
Connexió
Resolució (MP)
Resolució
La sèrie Canon PowerShot ofereix càmeres compactes i fàcils d'utilitzar per a tiradors casuals i entusiastes. Amb models que van des de simples càmeres de punta i dispar fins a càmeres de zoom avançades, ofereixen comoditat, qualitat d'imatge sòlida i funcions com l'estabilització d'imatge i el vídeo 4K.
Connexió
Resolució (MP)
Resolució
Les càmeres de mà i de primer pla de Canon estan dissenyades per a fotografies i vídeos detallats i propers. Compactes i fàcils d'utilitzar, ofereixen enfocament de precisió, imatges d'alta resolució i capacitats macro versàtils, perfectes per a vlogging, fotografia de productes i primers plans creatius.


