Guia de centratge i alineació làser PhotoRobot
Aquest manual d'assistència a l'usuari proporciona instruccions tècniques sobre com alinear i centrar els sistemes làser creuats integrats de PhotoRobot. Seguiu aquests passos per trobar el punt mitjà de qualsevol placa PhotoRobot rodona mitjançant dos làsers. Les instruccions inclouen com moure físicament els làsers al centre de la taula, la configuració inicial del làser i com ajustar el posicionament del làser. A més, al final del manual, hi ha instruccions per alinear i centrar el sistema làser especial del tocadiscs C1300 (anteriorment distribuït amb el nom de Case 1300).
Important: Consulteu sempre primer la informació i les instruccions de seguretat de PhotoRobot, a més del manual proporcionat específicament amb el vostre dispositiu abans de qualsevol autoinstal·lació o servei.
Nota: Consulteu PhotoRobot First Use & Basic Testing per obtenir informació detallada sobre la configuració de la xarxa i els requisits de la xarxa.
1. Moveu físicament els làsers al centre de la taula
1.1. Abans de començar, establiu una connexió entre el PhotoRobot i la xarxa local. A continuació, engegueu la unitat de control (6a generació) i una caixa làser.
Nota: Per alinear i centrar el sistema làser del tocadiscos C1300, consulteu també les instruccions especials de la secció 4 d'aquest manual d'usuari.
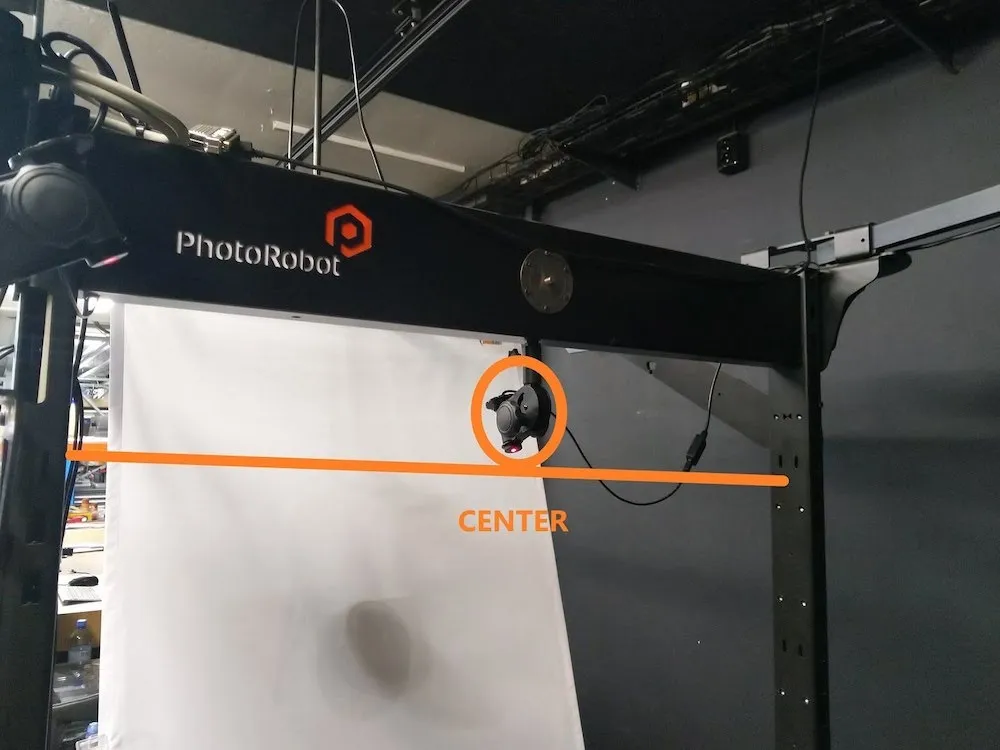
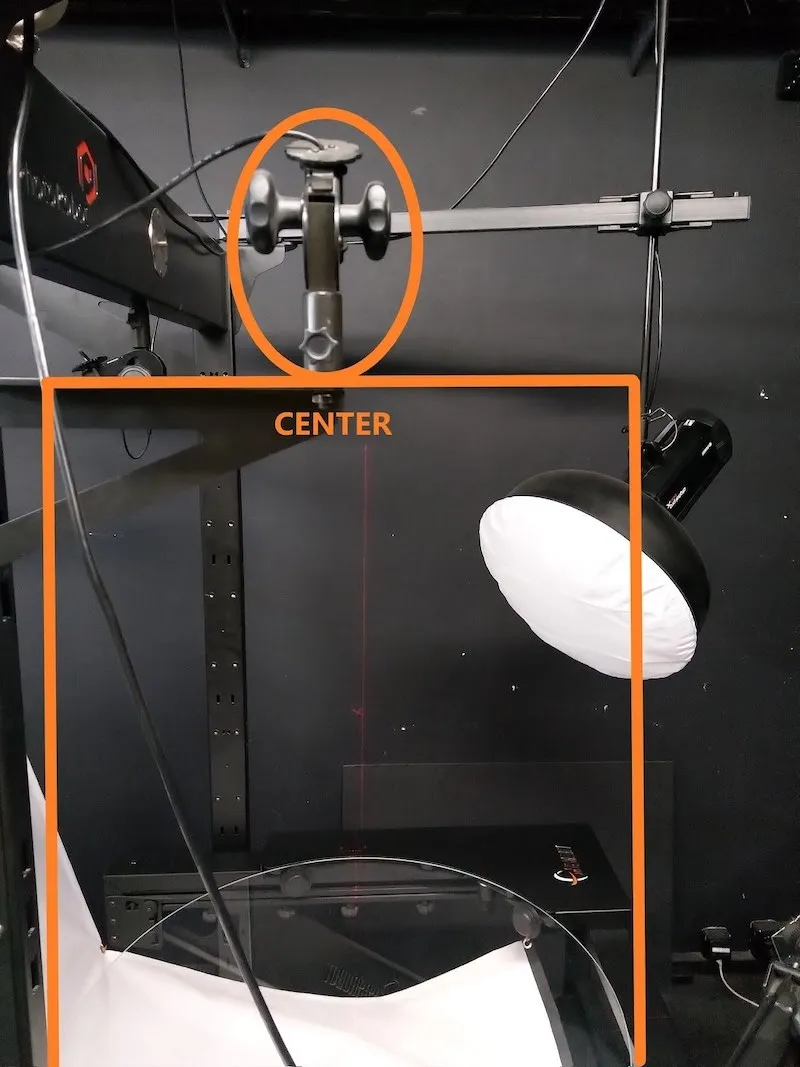
1.2. Després de connectar PhotoRobot a la xarxa i encendre la unitat de control i la caixa làser, mesureu la distància entre els dos costats de la taula on es munta el làser. A continuació, gireu o moveu el làser a mà cap al centre i fixeu-lo en posició.
2. Estimeu la configuració aproximada
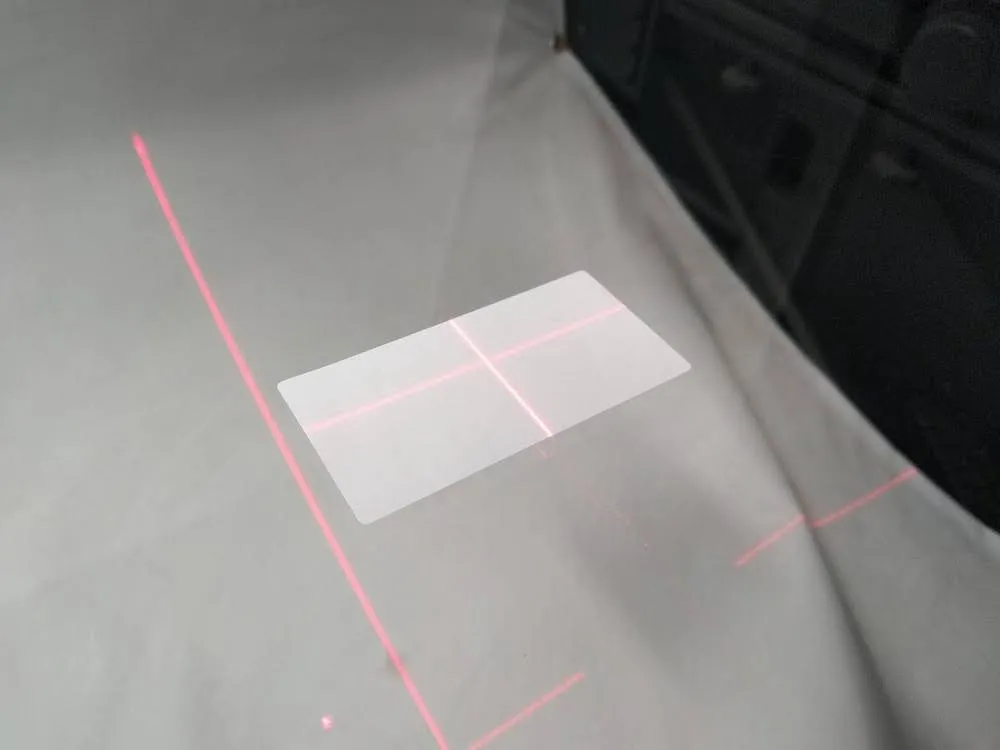
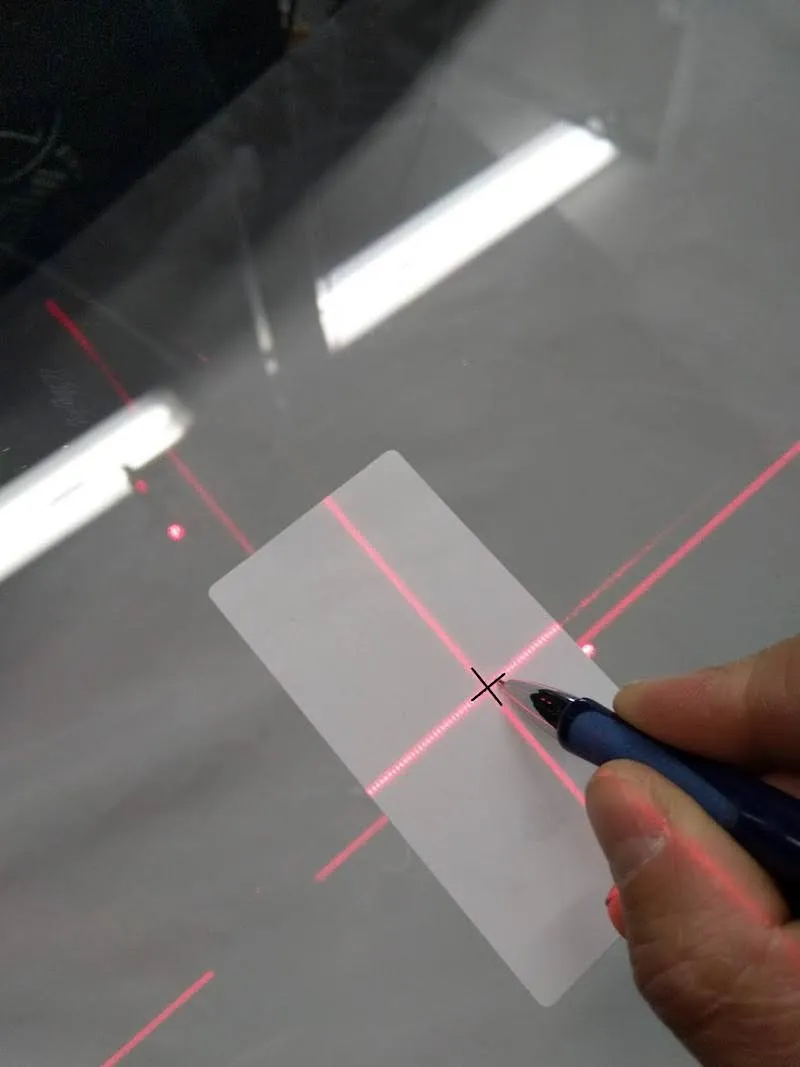
2.1. Quan el làser estigui fixat en posició, col·loqueu un adhesiu a la placa giratòria al punt mitjà aproximat del vidre. Els làsers es faran més visibles a l'adhesiu, ajudant a estimar millor el punt central de la placa.
2.2. Ajusteu els dos làsers a mà per alinear-los a l'adhesiu que estima el punt mitjà aproximat.
3. Ajusteu l'alineació làser
3.1. Traça una petita creu a l'adhesiu copiant la creu vermella dels làsers.
3.2. A continuació, inicieu l'aplicació Locator al vostre telèfon mòbil, cerqueu la unitat de control assignada al robot i accediu a la GUI del servei. Nota: Per obtenir instruccions detallades sobre xarxes, consulteu PhotoRobot Detailed Networking Prerequisits (secció 8: Informació de l'apèndix). A continuació, cerqueu la unitat de control assignada al robot i accediu a la seva GUI.

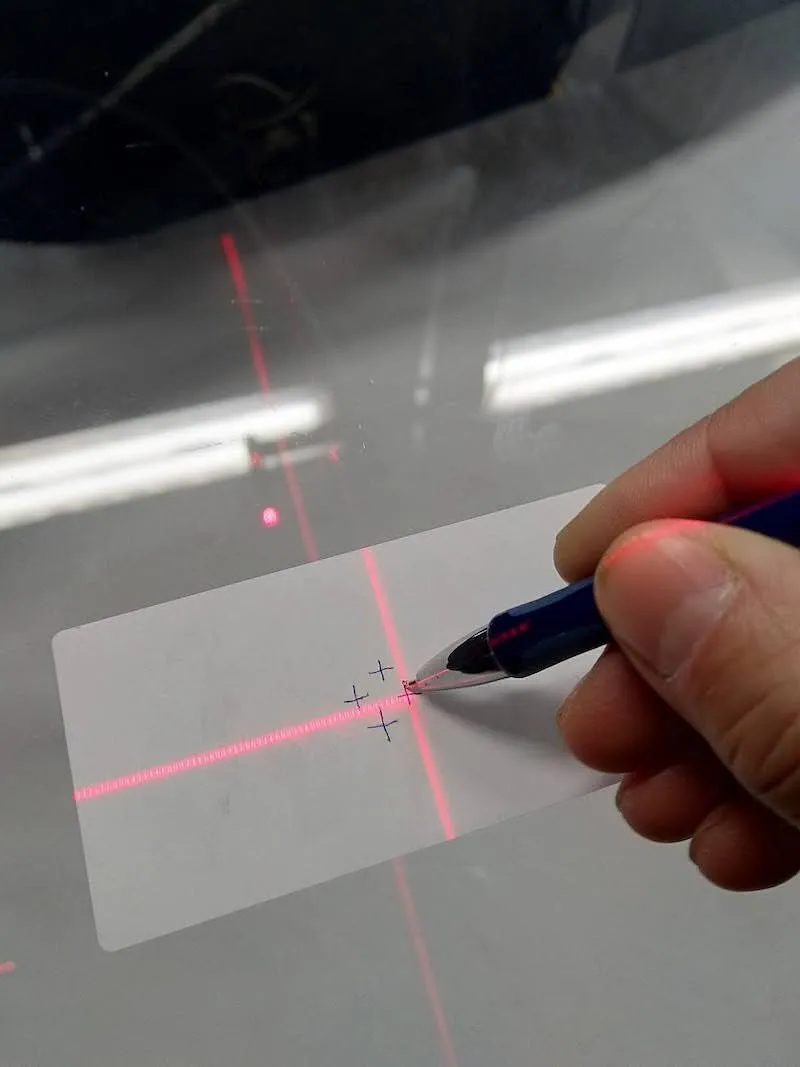
3.3. A la interfície gràfica de servei, utilitzeu els controls de gir per girar el vidre 90 graus i torneu a traçar la posició dels làsers creuats a l'adhesiu. Repetiu aquest pas dues vegades: gireu el vidre 90 graus, traçeu la creu làser, gireu 90 graus i seguiu la creu làser una última vegada.
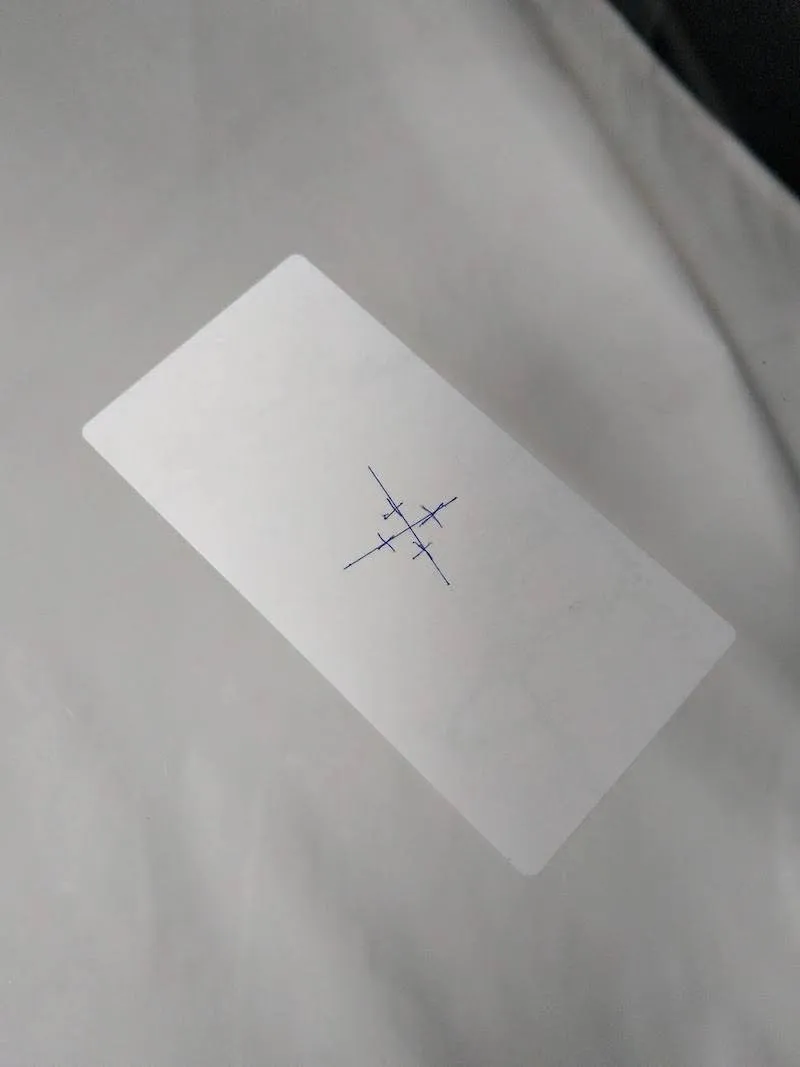
3.4. Després de traçar les quatre creus de l'adhesiu, connecteu cada creu oposada per línies rectes. L'encreuament resultant entre les creus individuals representarà el punt mitjà real de la placa de vidre.
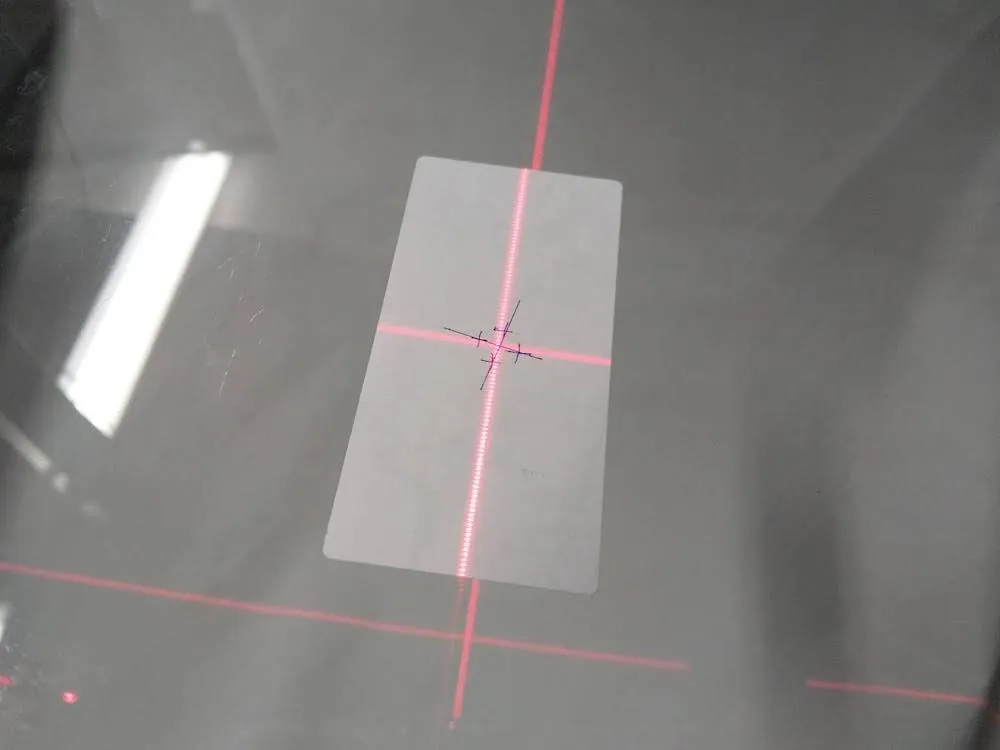
3.5. Finalment, ajusteu els dos làsers al punt mitjà identificat. El sistema làser ara estarà centrat i alineat amb el centre absolut de rotació de la placa.
4. Alineació i centratge de làsers especials C1300
4.1. Quan alineeu i centreu els làsers al robot C1300, tingueu en compte el sistema làser especial. El sistema làser C1300 té diverses diferències en comparació amb altres PhotoRobot. Tot i que els principis físics són els mateixos, la construcció del sistema làser C1300 compta amb una instal·lació de quatre làsers.
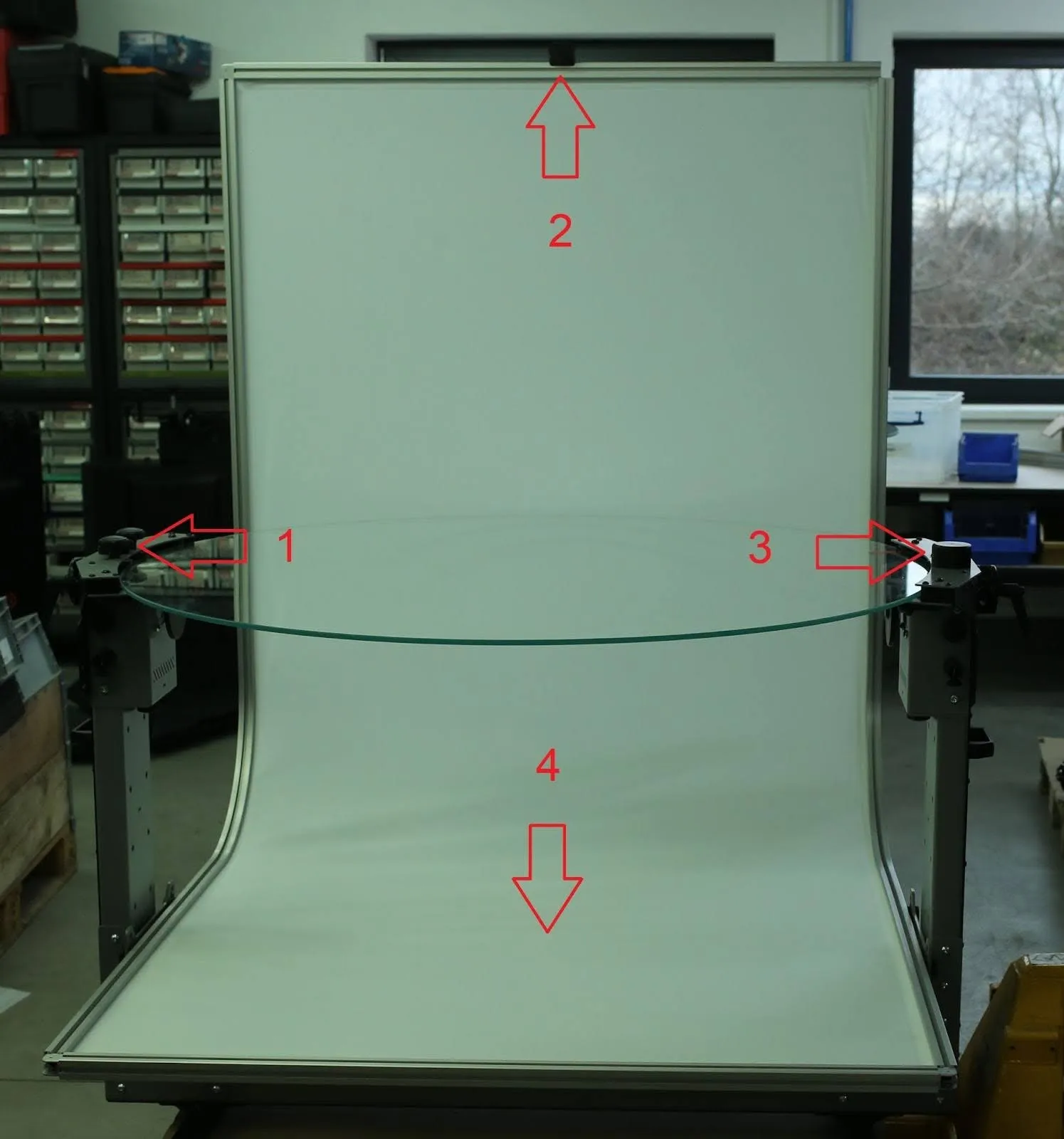
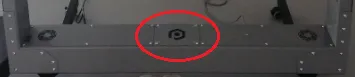
4.2. En aquest sistema, el làser 4 és una part integral de l'esquelet del robot C1300. El làser 4 és un làser creuat i brilla a través del fons blanc des de la part inferior. Per ajustar la posició del làser, cerqueu els quatre cargols platejats per descobrir la part quadrada central que allotja el làser.
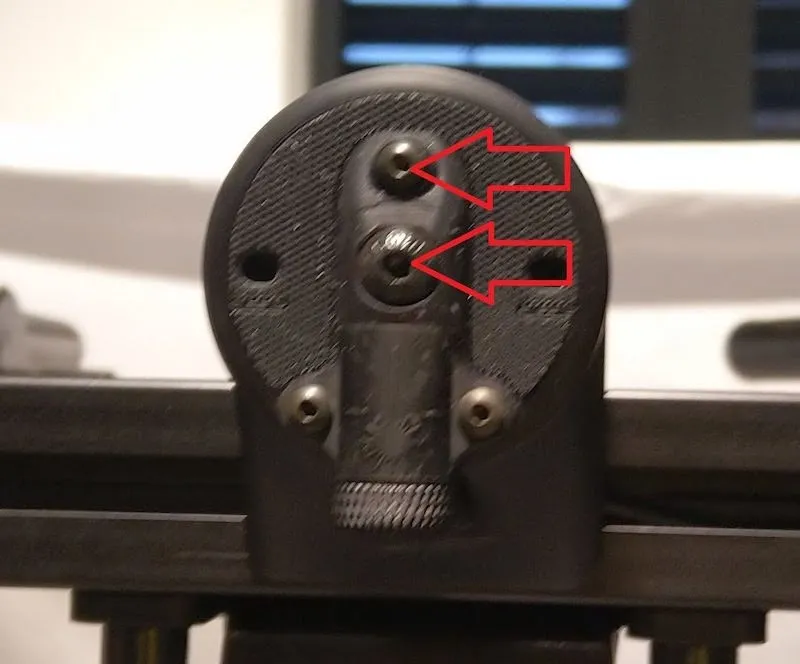
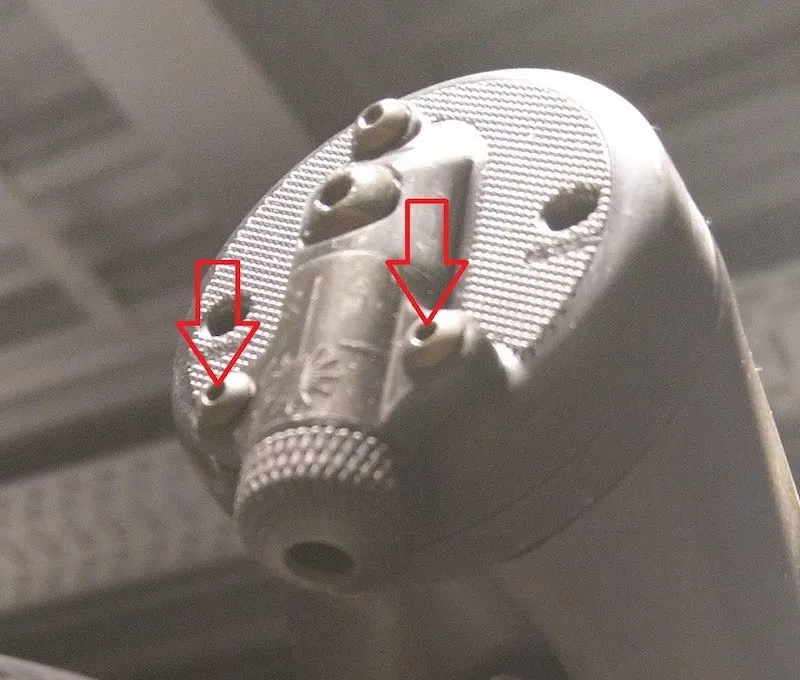
4.3. Després de descobrir la carcassa de la part quadrada central Làser 4, utilitzeu els dos cargols que subjecten la carcassa làser de plàstic per ajustar-ne la posició manualment.
Nota: El làser 1, el làser 2 i el làser 3 tenen la mateixa construcció que el làser 4. També són tots làsers de línia:



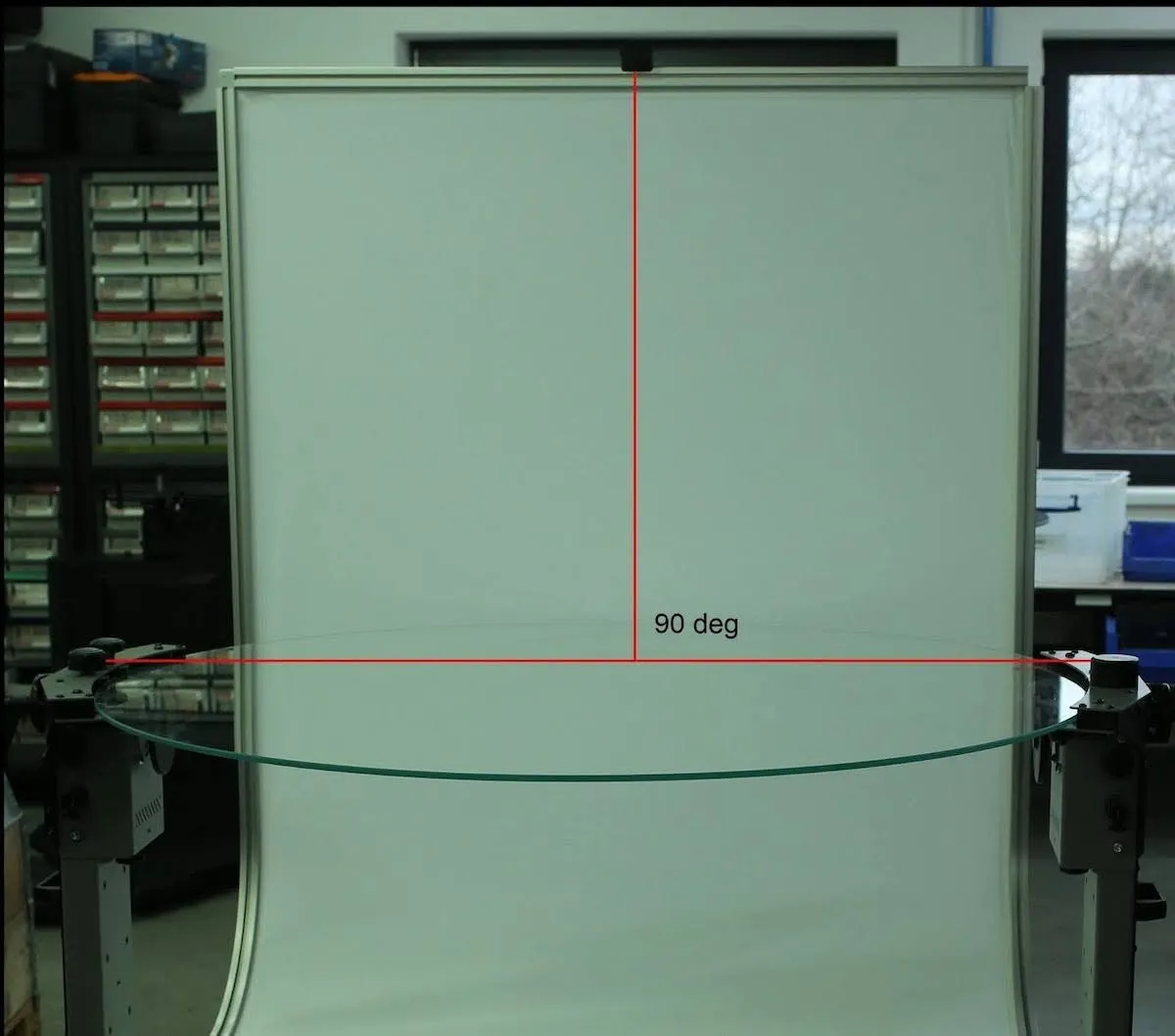
4.4. Finalment, quan alineeu i centreu els làsers, assegureu-vos que hi hagi un angle de 90 graus entre la línia làser del làser superior i la placa de vidre.


Sèrie EOS Rebel


Sèrie EOS DSLR


Sèrie sense mirall EOS M


Sèrie PowerShot


Primer pla / De mà

La sèrie Canon EOS Rebel ofereix càmeres DSLR aptes per a principiants amb una qualitat d'imatge sòlida, controls intuïtius i funcions versàtils. Ideals per als entusiastes de la fotografia, aquestes càmeres ofereixen un enfocament automàtic fiable, pantalles tàctils d'angle variable i gravació de vídeo Full HD o 4K.
Connexió
Resolució (MP)
Resolució
La sèrie Canon EOS DSLR ofereix imatges d'alta qualitat, enfocament automàtic ràpid i versatilitat, la qual cosa la fa ideal tant per a la fotografia com per a la producció de vídeo.
Connexió
Resolució (MP)
Resolució
La sèrie Canon EOS M Mirrorless combina un disseny compacte amb un rendiment similar a la DSLR. Amb lents intercanviables, enfocament automàtic ràpid i sensors d'imatge d'alta qualitat, aquestes càmeres són ideals per a viatgers i creadors de contingut que busquen portabilitat sense sacrificar la qualitat de la imatge.
Connexió
Resolució (MP)
Resolució
La sèrie Canon PowerShot ofereix càmeres compactes i fàcils d'utilitzar per a tiradors casuals i entusiastes. Amb models que van des de simples càmeres de punta i dispar fins a càmeres de zoom avançades, ofereixen comoditat, qualitat d'imatge sòlida i funcions com l'estabilització d'imatge i el vídeo 4K.
Connexió
Resolució (MP)
Resolució
Les càmeres de mà i de primer pla de Canon estan dissenyades per a fotografies i vídeos detallats i propers. Compactes i fàcils d'utilitzar, ofereixen enfocament de precisió, imatges d'alta resolució i capacitats macro versàtils, perfectes per a vlogging, fotografia de productes i primers plans creatius.


