Configuració d'un espai de treball PhotoRobot
El següent manual d'usuari descriu els passos per configurar un Espai de Treball a l'aplicació PhotoRobot Controls (més endavant, simplement "CAPP"). Un espai de treball és una llista de maquinari que s'utilitzarà per a una sessió de fotos específica. Pot incloure diversos mòduls PhotoRobot, càmeres, llums i altres accessoris.
Nota: Si encara no heu instal·lat ni us heu familiaritzat amb CAPP, consulteu PhotoRobot Getting Started per a una visió general del programari, la seva configuració i el seu ús. La informació d'aquest manual d'usuari té com a objectiu donar suport als clients que ja han assolit una comprensió general del programari.
També, per a la demostració, cal tenir en compte que és possible treballar amb un Sample Workspace predefinit, que està configurat per utilitzar maquinari virtual. Un espai de treball de mostra permet als usuaris experimentar amb diverses funcionalitats de CAPP seleccionant robots i càmeres virtuals.
Per crear un espai de treball, ves a Espais de treball a CAPP i després toca el botó de crear (+).
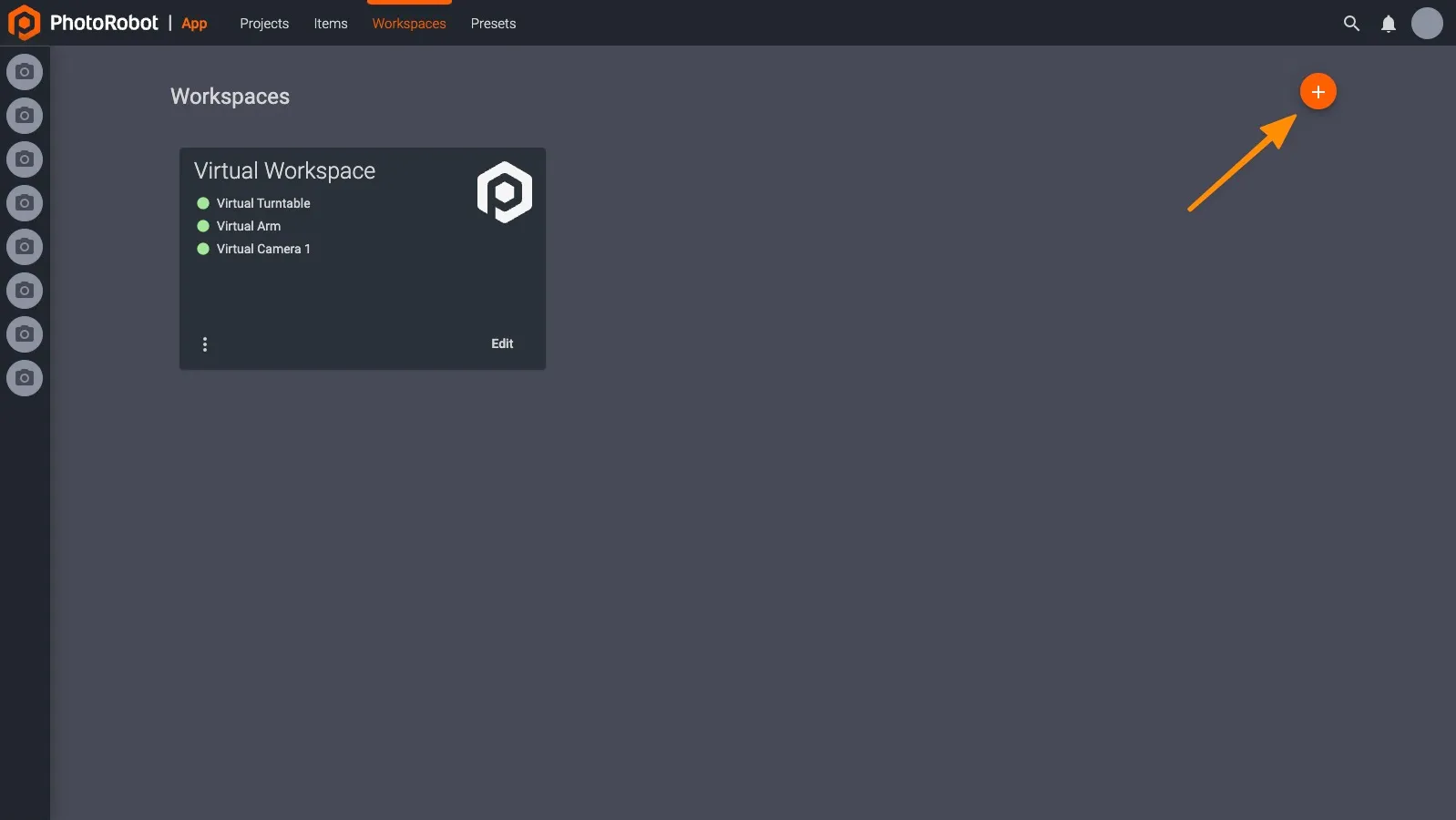
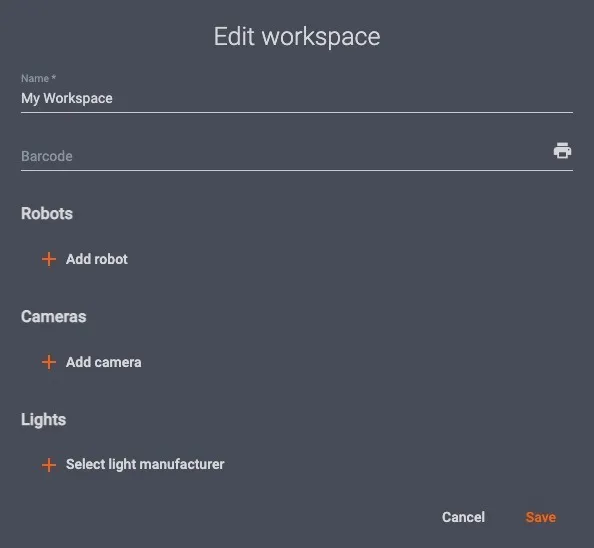
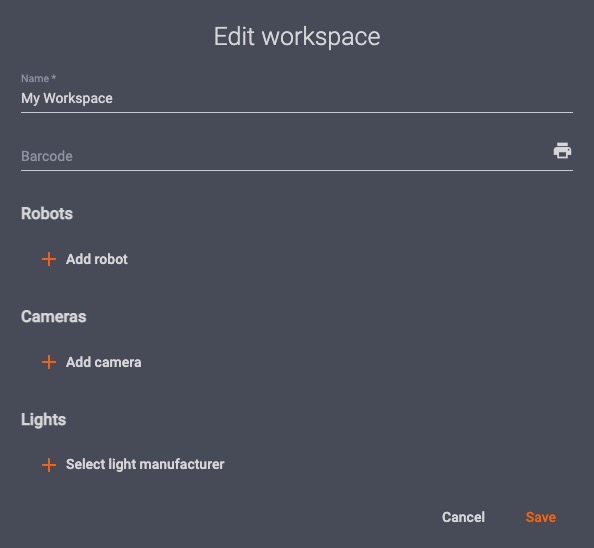
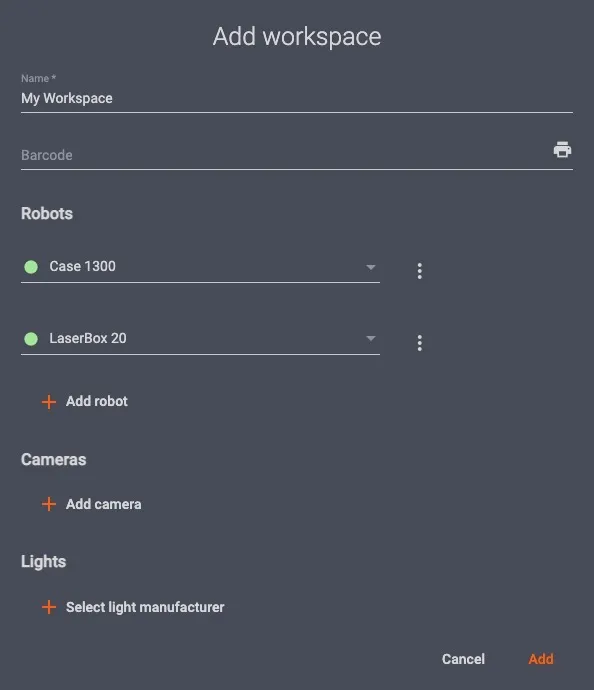
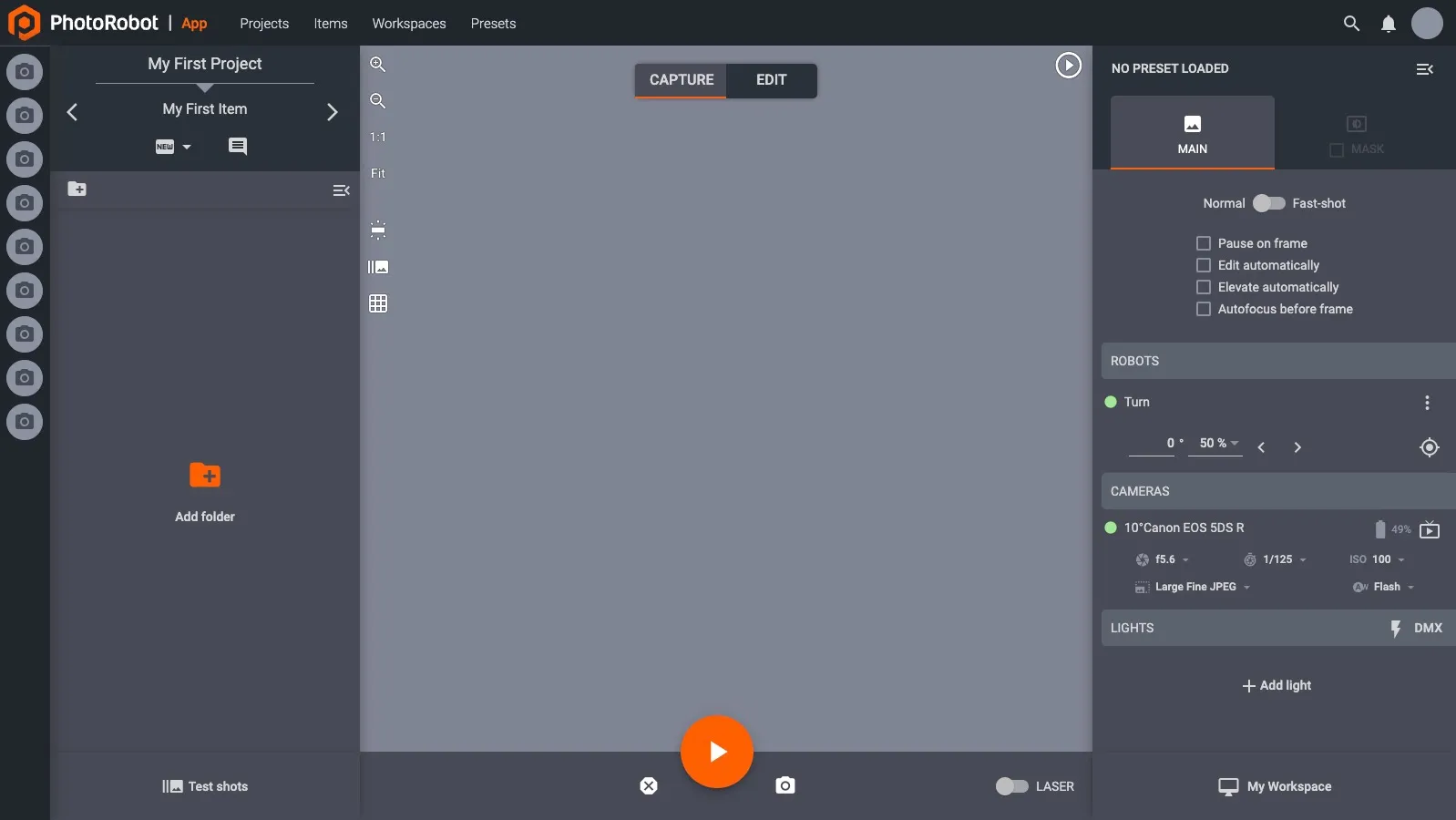
Prémer el botó de crear s'obrirà el menú d'espai de treball Edita, on és possible afegir robot, afegir càmera i seleccionar fabricant de llums.
Tingues en compte que després de connectar un dispositiu (o càmera) a un espai de treball, pots veure immediatament si està en línia (reconegut per CAPP). Per fer-ho, comprova el color del punt a l'esquerra del nom de l'equipament en qüestió. Si el dispositiu és reconegut, hi haurà un punt verd.

Alternativament, un punt gris indica que el maquinari no ha estat reconegut o que no està encès. Si hi ha un punt vermell, hi ha un error, com ara que l'usuari no posa la càmera en mode manual. Per identificar la causa de l'error, passa el cursor sobre el punt vermell per mostrar una descripció emergent amb una descripció de l'error que s'ha produït.
Per a problemes comuns i les seves solucions, consulteu el Manual de Resolució de Problemes de PhotoRobot.
Afegir robot
En el pas següent, assegureu-vos que tots els robots de la sessió de fotos estiguin activats i connectats a la mateixa xarxa d'àrea local que l'ordinador. A continuació, premeu Afegeix un robot.
- Premeu Afegeix un robot per veure una llista dels robots disponibles.
- Seleccioneu els robots que utilitzareu de la llista.
Configurar la captura ràpida
Per activar el mode de tret ràpid, connecteu qualsevol robot amb una càmera a través d'un cable d'obturador.
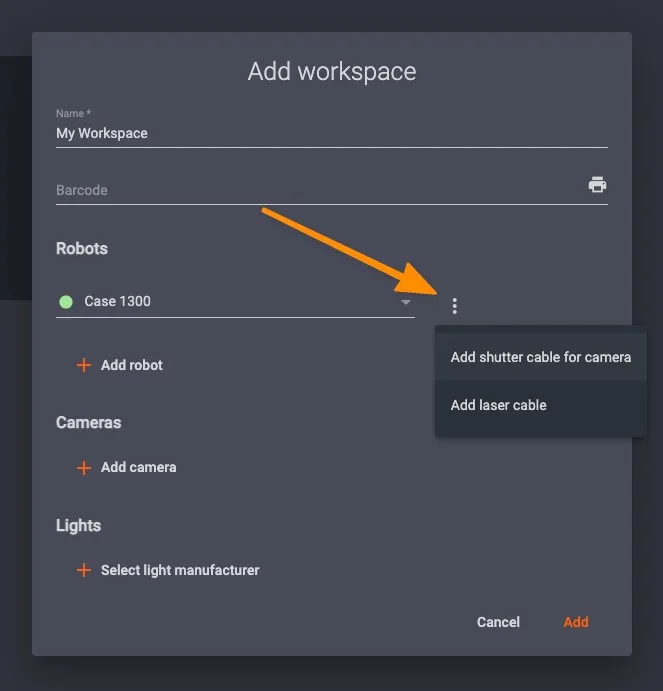
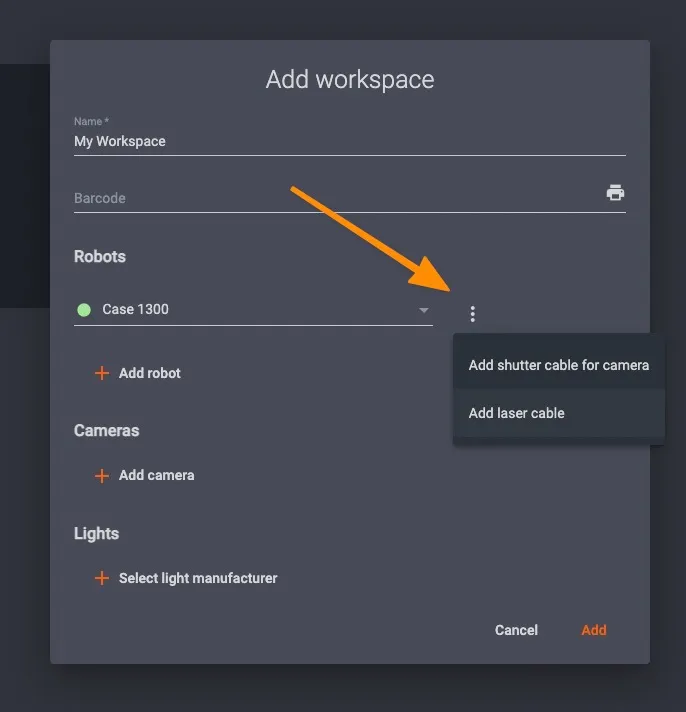
- Feu clic als Tres punts verticals que hi ha a la dreta del robot per obrir el menú de la càmera.
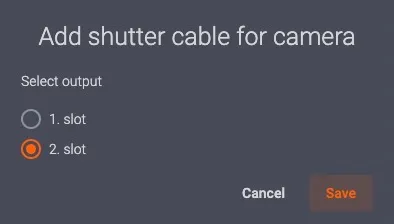
- Seleccioneu Afegeix un cable d'obturador per a la càmera.
- Trieu la ranura de sortida (1 o 2). Seleccioneu quina ranura de sortida en funció del cablejat físic del cable de l'obturador. Per als cables des de PhotoRobot, utilitzeu la ranura 2.
( ! ) - Per a altres fabricants, pot ser necessari utilitzar la ranura 1.
Configurar làsers
Depenent del maquinari en ús, hi ha diverses opcions per configurar làsers:
Per a làsers integrats
Tant el Case 850 com el 1300 disposen de sistemes làser dissenyats en el robot amb configuració zero requerida.
LaserBox de 20 ports
El LaserBox de 20 ports és un dispositiu autònom que permet controlar diversos làsers mitjançant connexió de xarxa. Per configurar el LaserBox, assegureu-vos primer que estigui activat i, a continuació, afegiu-lo com un altre robot a l'espai de treball:
LaserBox de 4 ports
Si teniu un LaserBox de 4 ports connectat al vostre robot, seleccioneu Afegeix un cable làser als elements del menú de 3 punts a la dreta de l'identificador del robot:
Afegir càmeres
Per afegir una càmera, primer assegureu-vos que el dispositiu estigui encès i connectat mitjançant USB a l'ordinador. Si no utilitzeu un robot amb capacitat de balanceig (per exemple, el braç robòtic o el marc), també haureu d'establir l'angle en què la càmera apuntarà a la taula.
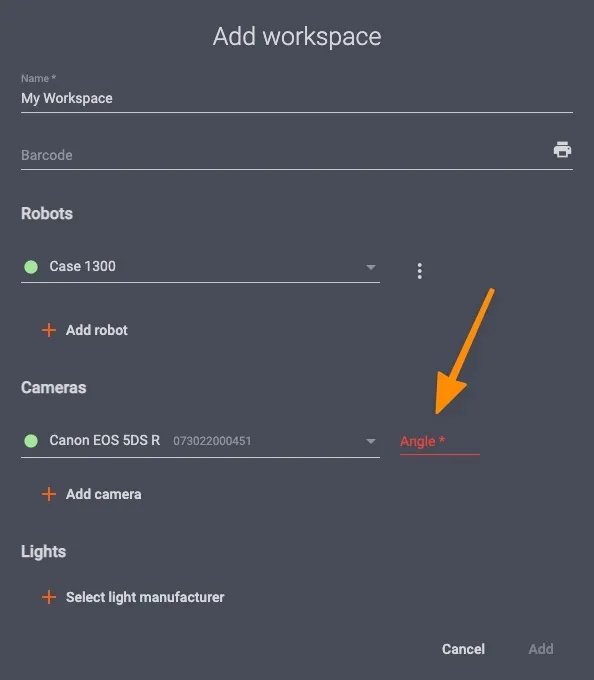
( ! ) - Ajustar l'angle per a robots sense capacitat de gir és necessari perquè funcionin certes característiques com l'autocentrat.
( * ) - Vegeu la llista completa de càmeres compatibles amb PhotoRobot.
Configura els llums
Els sistemes de llum compatibles amb PhotoRobot inclouen dos tipus de llums: llums estroboscòpics de FOMEI i Broncolor, o qualsevol llum LED amb suport DMX. Per configurar una configuració d'il·luminació al menú de l'espai de treball, aneu a Llums i afegiu llums compatibles a Seleccioneu el fabricant de llums.
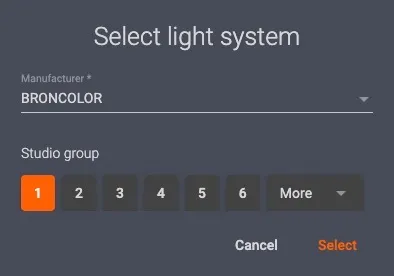
Llums estroboscòpiques - Broncolor
Per configurar els llums broncolor, seleccioneu primer BRONCOLOR i trieu entre el grup de llums Studio sobre el qual voleu controlar:
Llums estroboscòpiques - FOMEI
Per a llums de FOMEI, els usuaris tenen dues opcions de control:
FOMEI LAN Transceptor (mètode preferit)
Per controlar els llums a través de FOMEI LAN Transceiver, assegureu-vos primer que estigui en línia i connectat a la vostra xarxa.
A continuació, selecciona LAN. Després, sota LAN al menú desplegable, selecciona Fomei LAN Transceiver.

Dongle USB FOMEI (Llegat)
També és possible controlar els llums amb el dongle WiFi de FOMEI connectat directament a l'ordinador a través d'USB.
( ! ) Tingueu en compte que aquest mètode ja no es recomana. Això es deu al fet que requereix que s'instal·lin controladors addicionals a l'ordinador. FOMEI ja no és compatible amb sistemes MacOS més nous.
Llums LED - DMX
Per controlar qualsevol llum LED compatible amb el protocol DMX, connecteu els llums a través d'un cable RJ45 o USB al robot.
A continuació, podeu seleccionar DMX del fabricant de llum.
Més tard, creareu una llum individual a la pantalla Captura:
Per a cada llum, podeu configurar dos canals:

- El canal Brillantor permet controlar el nivell de brillantor de la llum seleccionada.
- El canal color està suportat per algunes llums i permet ajustar els nivells de color.


Sèrie EOS Rebel


Sèrie EOS DSLR


Sèrie sense mirall EOS M


Sèrie PowerShot


Primer pla / De mà

La sèrie Canon EOS Rebel ofereix càmeres DSLR aptes per a principiants amb una qualitat d'imatge sòlida, controls intuïtius i funcions versàtils. Ideals per als entusiastes de la fotografia, aquestes càmeres ofereixen un enfocament automàtic fiable, pantalles tàctils d'angle variable i gravació de vídeo Full HD o 4K.
Connexió
Resolució (MP)
Resolució
La sèrie Canon EOS DSLR ofereix imatges d'alta qualitat, enfocament automàtic ràpid i versatilitat, la qual cosa la fa ideal tant per a la fotografia com per a la producció de vídeo.
Connexió
Resolució (MP)
Resolució
La sèrie Canon EOS M Mirrorless combina un disseny compacte amb un rendiment similar a la DSLR. Amb lents intercanviables, enfocament automàtic ràpid i sensors d'imatge d'alta qualitat, aquestes càmeres són ideals per a viatgers i creadors de contingut que busquen portabilitat sense sacrificar la qualitat de la imatge.
Connexió
Resolució (MP)
Resolució
La sèrie Canon PowerShot ofereix càmeres compactes i fàcils d'utilitzar per a tiradors casuals i entusiastes. Amb models que van des de simples càmeres de punta i dispar fins a càmeres de zoom avançades, ofereixen comoditat, qualitat d'imatge sòlida i funcions com l'estabilització d'imatge i el vídeo 4K.
Connexió
Resolució (MP)
Resolució
Les càmeres de mà i de primer pla de Canon estan dissenyades per a fotografies i vídeos detallats i propers. Compactes i fàcils d'utilitzar, ofereixen enfocament de precisió, imatges d'alta resolució i capacitats macro versàtils, perfectes per a vlogging, fotografia de productes i primers plans creatius.


